Make everything work in my container Ubuntu 24.04, inside Linux Bluefin for the tomorrow #Nav2 #SLAM tutorial with my students 🤓 at @RoboticaSw_URJC @urjc

Yo Keegan - Question about mecanum wheels on your latest NE-Five:
Do mecanum wheels drive straight?
(Like dY < 1cm, dHeading < 2 degrees for dX of 1m)?
When you run him around the house and return is the encoder odometry totally bad?
My bot has a bit of "flopsy wheels" causing #ROS2 #localization / #nav2 with LIDAR and /odom to "lose it" on long excursions around my house.
Thinking about a new bot with #mecanum wheels instead of #DifferentialDrive with "flopsy" plastic motors
GoPi5Go-Dave now has a (virtual environment) Quantum Processor!
Installed Qiskit-Aer Quantum Simulator, and managed to get a few "example circuits" to run.
I have absolutely no idea what robot Dave can do with his Quantum Processor, nor how to design the logic circuits.
Supposedly a Quantum Processor could run circles around ROS 2 Nav2 (if I add a mobile refrigerator to my robot).
#GoPiGo3 #QuantumProcessing #Qisket_Aer #ROS_2 #Nav2 #MobileRobots
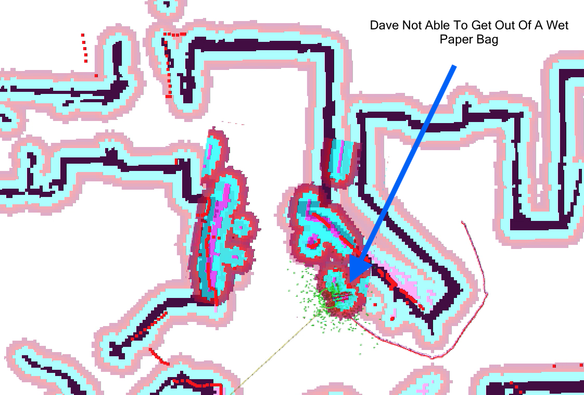
#SLAM_Toolbox Mapping w/o Localization
Got slam_toolbox mapping with localization turned off, but managed to figure out how to serve up a better looking map from my house floor plan.
The weakness of dead reckoning #odometry becomes very evident with the floorplan map.
Next up - #DeadReckoning #navigation with #ros2humble #nav2 and #map_server



After 2 years my #ROS_2 #GoPiGo3 #robot finally knows how to navigate - I'm amazed by #slam_toolbox and #nav2
Here's Humble Dave doing #mapping, #localization, and now #navigation

Multi-Hypothesis AMCL Nav2-ready working in a Simulated @RobotnikRobots Summit XL with a #Velodyne sensor in a Simulated non-planar environment
#ROS2 #Nav2 #Navigation #Localization #AMCL #Robotics #Science #SummerProjects 🏖️
