#Create3 #IRsensor SLAM - First Attempt
My ir2scan node is working well, but setting the 52 #slam_toolbox params is a mystery.
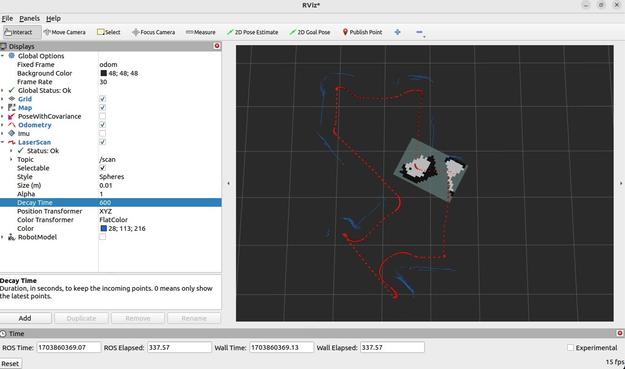
My create3_navigation slam.launch.py (using #Turtlebot4 LIDAR parms modified for Create3 IR "distance" sensor scan), with Wali facing a wall, maps a wall!
(bouncing around in angle in front of bot...)
As I proceed to drive Wali around the room, more walls enclosing a "known to be open" space are mapped, but not where the sensors and #odometry put them.