Francesco Capuano (@_fracapuano)
Codex를 활용해 VR 원격조작(in-VR teleoperation)을 위한 엔드투엔드 시뮬레이션 프레임워크를 구축한 사례를 소개한다. 10개 이상의 환경에서 여러 로봇을 시뮬레이션하며, 로봇 제어와 멀티로봇 시뮬레이션 자동화 가능성을 보여주는 실용적 AI/로보틱스 응용이다.
Francesco Capuano (@_fracapuano)
Codex를 활용해 VR 원격조작(in-VR teleoperation)을 위한 엔드투엔드 시뮬레이션 프레임워크를 구축한 사례를 소개한다. 10개 이상의 환경에서 여러 로봇을 시뮬레이션하며, 로봇 제어와 멀티로봇 시뮬레이션 자동화 가능성을 보여주는 실용적 AI/로보틱스 응용이다.
Ilir Aliu (@IlirAliu_)
FRANKA Robotics의 FR3 Duo를 GELLO Duo로 원격 조작해 양팔 작업용 멀티모달 학습 데이터를 수집하는 로보틱스 데모를 소개한다. 촉각과 토크 신호까지 포함해 실제 현장에서 로봇 학습 데이터 파이프라인을 구축하는 방식이 핵심이다.

If you’re entering robotics and don’t know where to start... Follow the data: Last week I saw it demonstrated live. @FRANKAROBOTICS showed how FR3 Duo is teleoperated via GELLO Duo to capture multimodal training data for bimanual tasks, including tactile torque signals. That
Ilir Aliu (@IlirAliu_)
로봇 학습 입문자에게는 데이터를 따라가라는 조언과 함께, FRANKA ROBOTICS의 FR3 Duo가 GELLO Duo를 통해 양팔 작업용 멀티모달 학습 데이터를 원격조작으로 수집하는 사례를 소개한다. 촉각·토크 신호까지 포함해 로봇 데이터 수집 방식의 중요성을 보여준다.
If you’re entering robotics and don’t know where to start... Follow the data: Last week I saw it demonstrated live. @FRANKAROBOTICS showed how FR3 Duo is teleoperated via GELLO Duo to capture multimodal training data for bimanual tasks, including tactile torque signals. That
The Humanoid Hub (@TheHumanoidHub)
Honor Lightning 휴머노이드가 베이징 하프마라톤에서 결승선 직전 넘어졌지만 다시 일어나 완주했고, 48분 19초로 가장 빠른 기록을 냈다는 내용입니다. 다만 원격조종과 관련한 페널티가 부여됐습니다.

The Honor Lightning humanoid is built tough!! During the Beijing Half Marathon, it fell just metres from the finish line, got back up, and kept going. It crossed the line with the fastest time of 48m 19s, but was penalized with a 1.2x time multiplier for being teleoperated and
Lukas Ziegler (@lukas_m_ziegler)
오픈소스 휴머노이드 로봇 OpenArm이 공개됐다. CAD 설계도, 제어 코드, 펌웨어, 시뮬레이션 도구까지 함께 제공되어 사용자가 직접 제작·수정·운영할 수 있다. 팔은 순응성과 역구동성을 고려해 설계됐고, 텔레오퍼레이션도 지원한다.

Build a humanoid robot yourself! 🪚 OpenArm is an open-source humanoid robot. It comes with full CAD, control code, firmware, and simulation tools, everything needed to build, modify, and operate it. The arms are designed to be compliant and backdrivable. Teleoperation is
fly51fly (@fly51fly)
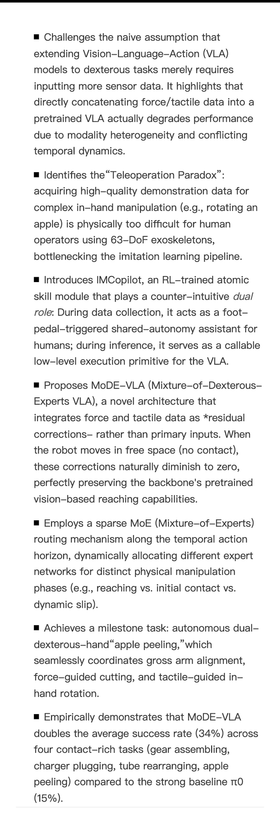
인간과 유사한 조작을 목표로 한 연구가 arXiv에 공개되었습니다: 강화학습(RL)로 보강한 원격조작(teleoperation)과 'Mixture-of-Dexterous-Experts VLA' 방식을 제안합니다. 저자 T Tang, X Ji, W Xing, C Hao 등(Shanghai Jiao Tong University & Sharpa)이 공동 발표한 논문(2603.08122)입니다. 인간 수준의 섬세한 조작 향상을 목적으로 합니다.
https://x.com/fly51fly/status/2033297975972417595
#robotics #teleoperation #reinforcementlearning #manipulation
The Humanoid Hub (@TheHumanoidHub)
강화학습(RL)으로 손 안(in-hand) 스킬(그립 안정성 및 물체 회전)을 학습해 원격조작(teleoperation)을 보조하고, 그 원격조작 데이터를 이용해 힘(force)과 촉각(tactile) 피드백을 융합해 동작을 생성하는 VLA 모델을 학습했다고 보고합니다. 실험은 휴머노이드 하드웨어 'Sharpa'에서 수행되었으며 관련 논문은 arXiv:2603.08122입니다.
https://x.com/TheHumanoidHub/status/2033223493517754828
#robotics #reinforcementlearning #teleoperation #tactile #humanoid
Ilir Aliu (@IlirAliu_)
SONIC이라는 이름의 오픈소스 프로젝트가 공개되어 누구나 사용할 수 있는 generalist whole-body teleoperation 파이프라인(전신 제어, 기구학 플래너, 원격조작)을 제공합니다. 현재 추론 코드와 모델이 공개되어 있으며, 학습 코드와 지속적 업데이트도 순차적으로 공유될 예정이라는 발표입니다.

Generalist whole-body teleoperation for EVERYONE! Now open-source 🔥 Comprehensive pipelines for whole-body control, kinematic planner, and teleoperation: SONIC. And they will all be shared❗️ There will be a continuous update; inference code + model already there, training
Here's a photo of one of Icarus Robotics' semi-autonomous teleoperated robots — an important milestone as they build towards fully autonomous systems.
Find out more by listening to Episode 146 of Robot Talk - available on all major podcast providers: https://linktr.ee/robottalkpod

The Humanoid Hub (@TheHumanoidHub)
휴머노이드 원격조종(teleoperation)은 비용과 확장성 문제가 있는데, 이를 겨냥한 NVIDIA의 EgoScale이 소개됩니다. EgoScale은 수천 시간의 제1인칭(egocentric) 인간 영상으로 사전학습된 VLA 모델이며, 인간-로봇 정렬을 위해 50시간의 인간 데이터와 4시간의 로봇 '플레이' 데이터로 미드트레이닝되었다고 합니다.

The problem with humanoid teleoperation is that it is expensive and difficult to scale Enter NVIDIA's EgoScale: - A VLA model pretrained on thousands hours of egocentric human videos. - Mid-trained via 50 hours of human + 4 hours of robot "play" data for human-robot alignment.