Tesla’s newly unredacted robotaxi crash reports expose the latency gap between FSD decisions and teleoperator interventions. In both incidents the remote operator acted too late, leading to low-speed impacts, highlighting that communication delay and sensor-fusion mismatches remain critical safety bottlenecks as the fleet scales. 🚗 #AutonomousDriving #Teleoperation #SafetyEngineering - Powered by FG
Francesco Capuano (@_fracapuano)
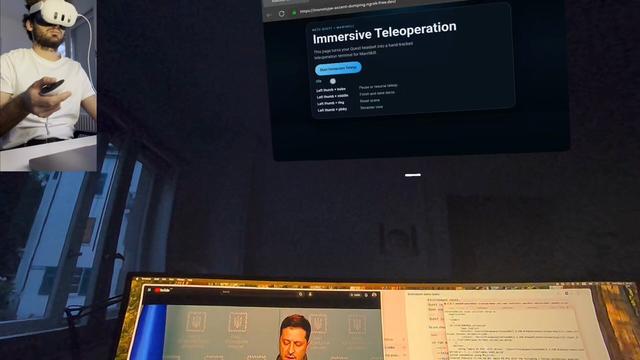
Codex를 활용해 VR 원격조작(in-VR teleoperation)을 위한 엔드투엔드 시뮬레이션 프레임워크를 구축한 사례를 소개한다. 10개 이상의 환경에서 여러 로봇을 시뮬레이션하며, 로봇 제어와 멀티로봇 시뮬레이션 자동화 가능성을 보여주는 실용적 AI/로보틱스 응용이다.