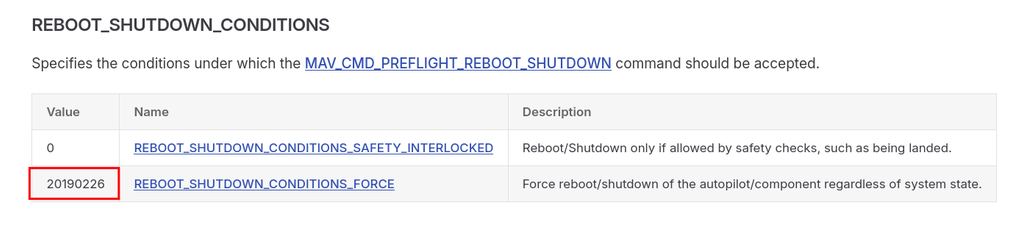
What an interesting choice for a constant. 🤔 I don't believe in coincidences. Was this done to prevent anyone from accidentally force-rebooting or shutting down the drone?
What an interesting choice for a constant. 🤔 I don't believe in coincidences. Was this done to prevent anyone from accidentally force-rebooting or shutting down the drone?
If someone tells you that contributing to open source is a hard and thankless task — don't believe them! It really depends on the project. Today I submitted my third patch to QGroundControl, and it was accepted in less than two hours. 😮
https://github.com/mavlink/qgroundcontrol/pull/13517
It’s a rewarding and encouraging experience — seeing your code get merged and soon used by others is such a great feeling.
Моделирование группы БПЛА в симуляционной среде (PX4 ROS 2 Gazebo)
Проект для управления группой беспилотных летательных аппаратов, реализованный с использованием ROS 2 и PX4 Autopilot. Основная цель — автоматизация управления несколькими дронами в симуляционных условиях. Для моделирования используется симулятор Gazebo. Система поддерживает централизованное управление через ROS topics, обработку высокоуровневых команд в формате JSON.
Heh! No problems so far on  #NixOS! Even hotplugging works. So there is apparently a catastrophic bug in
#NixOS! Even hotplugging works. So there is apparently a catastrophic bug in  #RaspberryPiOS's USB stack that kills *only* the Pi Zero 2W when Ardupilot USB devices are connected and communicate with #MAVLink. 🙃
#RaspberryPiOS's USB stack that kills *only* the Pi Zero 2W when Ardupilot USB devices are connected and communicate with #MAVLink. 🙃
So on with #NixOS, then! 💪
Как я разработал квадрокоптер на ESP32 с нуля (ушло 4 года)
При сборке квадрокоптеров и других БПЛА обычно используют готовую плату полетного контроллера, содержащую все необходимые датчики и периферию, и готовую полетную прошивку, например, Betaflight, ArduPilot или PX4. Полетный контроллер управляет моторами квадрокоптера и обеспечивает стабильный полет. Занимаясь БПЛА с 2016 года, я решил разобраться в устройстве полетных контроллеров максимально глубоко и создать квадрокоптер с нуля, не используя готовый полетный контроллер и готовый софт. Спустя долгое время разработки мне удалось это сделать. Я написал прошивку с максимально простым исходным кодом и выложил ее на GitHub . В этой статье я расскажу о теории и практике разработки полетного софта для квадрокоптера и проиллюстрирую это на примере своего дрона на базе микроконтроллера ESP32, который можно увидеть на картинке выше.
https://habr.com/ru/articles/814127/
#квадрокоптер #arduino #esp32 #imu #бпла #автопилот #беспилотник #теория_автоматического_управления #mavlink #дрон
We bring a simple 'table top' #UAS.
1. #UAV : A #BeagleBone Blue attached to a quad frame running either #ArduPilot or #PX4. We exploit network services and misconfigured firmware update
2. #GCS : Android phone and gamepad joystick controller running #QGroundControl. We exploit vulnerable apps on the phone.
3. COMMS: WiFi via the BB-Blue access point. We crack the #WiFi password and sniff #MAVLink off the air
The subtext is to demonstrate vulns in each of these subsystems and how you can use those to pivot from one to another.
Our audiences have varied from vendor sales and mgmt at Xponential to more technically mixed folks at BlackHat. Gonna be challenged to make it interesting for the technical audience at #PX4. But many UAS software engineers haven't really been exposed to how cybersecurity folks think and test, so I hope they find that fun.
ESP32 #MAVLink Arduino Example Sourcecode
https://github.com/technopolistv/ESP32-MAVLink-Arduino-Example
Build your own MAVLink unmanned vehicle 🛩️🏎️
#Arduino #PlatformIO #Drone #UAV #UGV #QGroundControl
https://www.technopolis.tv/blog/2023/07/12/How-to-use-MAVLink-on-ESP32/
#PlatformIO: How to use #RobotDyn Arduino Leonardo Ethernet W5500
#Arduino #Leonardo #Micro #Ethernet #W5500 #W5100 #HID #MAVLink #ATMEGA328P #ATMEGA32U4