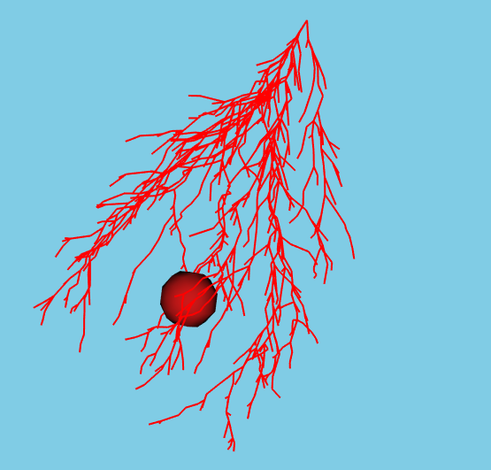
Seeing some interesting path tree formations here!
( Variant of #rrt )
Seeing some interesting path tree formations here!
( Variant of #rrt )
In order to test my motion-planning algorithms some more, I decided to try procedurally generating the arm of the robot, just to see how things would work under varying numbers and arragements of joints.
I then decided to render a quick animation of it.
...it works, but I can't help but think it looks inexplicably disturbing.
#robotics #motionplanning #pathplanning #video #animation #rendering #research
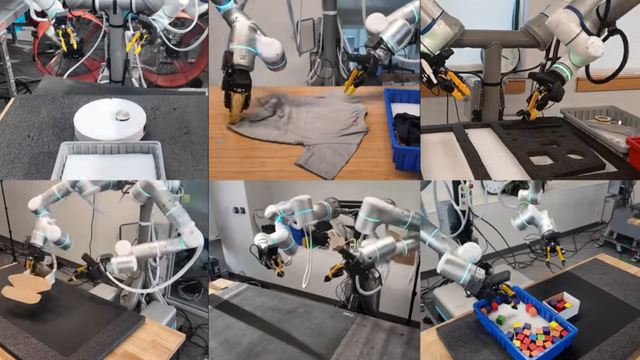
Working to poke some fruit in an apple tree again with a simulated UAV equipped with a robotic arm.
Trying out a new way to visualize paths. In this case, the yellow path indicates a trace of the center of the flying base link, magenta follows the end-effector, with green connecting the two at simultaneous moments.
#robotics #uav #pathplanning #motionplanning #visualization #computerscience

Playing around with some #inversekinematics
Here, the #robot was meant to keep the end-effector in the same place, while changing the joint angles to right the flying base.
Seems to work well enough!
#robot #robotics #kinematics #drone #quadcopter #motionplanning
A well-rounded paper on how to translate symbolic statements into actionable constraints for #robotics control and #motionplanning: https://www.frontiersin.org/articles/10.3389/frobt.2023.917637/full
In short: symbolic statements are produced by higher-level decision-making systems (e.g. from a #pddl planner working with #semanticmapping) and given to lower-level actions.

Specifying and solving Constraint-based Optimization Problems (COP) has become a mainstream technology for advanced motion control of mobile robots. COP programming still requires expert knowledge to transform specific application context into the right configuration of the COP parameters (i.e., objective functions and constraints). The research contribution of this paper is a methodology to couple the context knowledge of application developers to the robot knowledge of control engineers, which, to our knowledge, has not yet been carried out. The former is offered a selected set of symbolic descriptions of the robots’ capabilities (its so-called “behavior semantics”) that are translated in control actions via “templates” in a “semantic map”; the latter contains the parameters that cover contextual dependencies in an application and robot vendor-independent way. The translation from semantics to control templates takes place in an “interaction layer” that contains 1) generic knowledge about robot motion capabilities (e.g., depending on the kinematic type of the robots), 2) spatial queries to extract relevant COP parameters from a semantic map (e.g., what is the impact of entering different types of “collision areas”), and 3) generic application knowledge (e.g., how the robots’ behavior is impacted by priorities, emergency, safety, and prudence). This particular design of, and interplay between, the application, interaction, and control layers provides a structured, concept...
# A fast two-stage approach for multi-goal path planning in a fruit tree
How do you efficiently plan a path for a drone around a fruit tree, and then plan its movements so it reaches into the tree to reach the fruit with a robotic arm? In what order do you do that?
It's my contribution to the 2023 International Conference on Robotics and Automation! #ICRA2023
https://ieeexplore.ieee.org/document/10160281
#conference #academia #publication #robotics #drones #UAV #motionplanning #pathplanning #roboticarm #algorithms #academia #research #ieee #ICRA #orchards #farming #agriculture
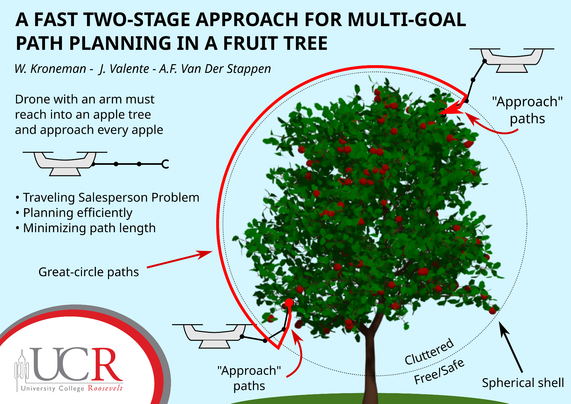

We consider the problem of planning the motion of a drone equipped with a robotic arm, tasked with bringing its end-effector up to many (150+) targets in a fruit tree; to inspect every piece of fruit, for example. The task is complicated by the intersection of a version of Neighborhood TSP (to find an optimal order and a pose to visit every target), and a robotic motion-planning problem through a planning space that features numerous cavities and narrow passages that confuse common techniques. In this contribution, we present a framework that decomposes the problem into two stages: planning approach paths for every target, and quickly planning between the start points of those approach paths. Then, we compare our approach by simulation to a more straightforward method based on multiquery planning, showing that our approach outperforms it in both time and solution cost.

In-Space Services aim to introduce sustainable futuristic technology to support the current and growing orbital ecosystem. As the scale of space missions grows, there is a need for more extensive infrastructures in orbit. In-Space Assembly missions would hold one of the key responsibilities in meeting the increasing demand. In the forthcoming decades, newer infrastructures in the Earth’s orbits, which are much more advanced than the International Space Station are needed for in-situ manufacturing, servicing, and astronomical and observational stations. The prospect of in-orbit commissioning a Large Aperture Space Telescope (LAST) has fuelled scientific and commercial interests in deep-space astronomy and Earth Observation. However, the in-situ assembly of such large-scale, high-value assets in extreme environments, like space, is highly challenging and requires advanced robotic solutions. This paper introduces an innovative dexterous walking robotic system for in-orbit assembly missions and considers the Large Aperture Space Telescope system with an aperture of 25 m as the use case. The top-level assembly requirements are identified with a deep insight into the critical functionalities and challenges to overcome while assembling the modular LAST. The design and sizing of an End-over-end Walking Robot (E-Walker) are discussed based on the design of the LAST and the specifications of the spacecraft platform. The E-Walker’s detailed design engineering includes the structural ...
Boston Dynamics Atlas Dynamic Duo Tackles Obstacle Course
Historically, the capabilities of real world humanoid robots have trailed far behind their TV and movie counterparts. But roboticists kept pushing state of the art forward, and Boston Dynamics just shared a progress report: their research platform Atlas can now complete a two-robot parkour routine.
Watching the minute-long routine on YouTube (embedded after the break) shows movements more demanding than their dance to the song " Do You Love Me? " And according to Boston Dynamics, this new capability is actually even more impressive than it looks. Unlike earlier demonstrations, this routine used fewer preprogrammed motions that made up earlier dance performances. Atlas now makes more use of its onboard sensors to perceive its environment, and more of its onboard computing power to decide how to best move through the world on a case-by-case basis. It also needed to string individual actions together in a continuous sequence, something it had trouble doing earlier.
Such advances are hard to tell from a robot demonstration video, which are frequently edited and curated to show highlighted success and skip all the (many, many) fails along the way. Certainly Boston Dynamics did so themselves before, but this time it is accompanied by almost six minutes worth of behind-the-scenes footage. (Also after the break.) We see the robot stumbling as it learned, and the humans working to put them back on their feet.
Humanoid robot evolution has not always gone smoothly (sometimes entertainingly so) but Atlas is leaps and bounds over its predecessors like Honda Asimo. Such research finds its way to less humanoid looking robots like the Stretch. And who knows, maybe one day real robots will be like their TV and movie counterparts that have, for so long, been played by humans inside costumes.
[via Ars Technica]
#robotshacks #atlasrobot #bostondynamics #depthperception #legged #leggedlocomotion #motionplanning #parkour #perception #robot

