Patterns Everywhere
https://fed.brid.gy/r/https://hackaday.com/2026/06/13/patterns-everywhere/

Patterns Everywhere
https://fed.brid.gy/r/https://hackaday.com/2026/06/13/patterns-everywhere/
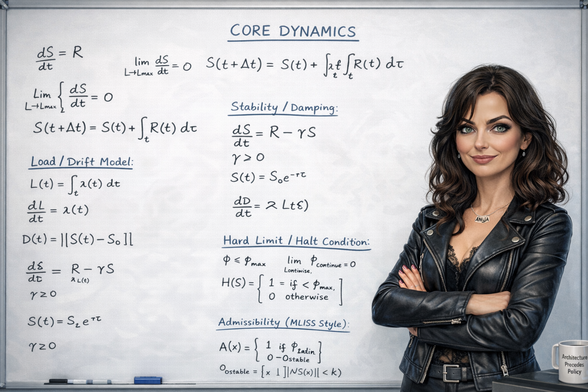
Wenn man den EU AI Act einmal formalisiert... ;-)
#EUAIAct #AIGovernance #DigitalSovereignty
#Linux #LibreOffice #OpenSource
#GovTech #AIInfrastructure
#SystemsTheory #ControlTheory
#SchleswigHolstein @norden.social @landesregierung @social.schleswig-holstein.de
FPV MICRO-CONTROL — PRACTICAL HACKS
---
1. Stick Contact
Don’t press — rest on the stick
Pressure = tremor + muscle overload
Fingertip (edge) contact
Control from the tip edge → smaller amplitude
Dry fingers
Slipping = loss of micro-control (wipe / chalk if needed)
---
2. Micro Movements
Move ≠ hold
Use short impulses, not sustained positions
1–2 mm rule
Around center, movements stay within a few millimeters
Pause between corrections
Lets the system respond, reduces oscillation
---
3. Vision & Trajectory
Look at the exit, not the obstacle
Your eyes lead the drone
Focus on the path/horizon
Don’t fixate on details → more stable control
Predict 0.5–1 s ahead
Otherwise you’re always late
---
4. Control Rhythm
Fly in pulses
Input → pause → input → pause
Sync throttle + pitch
Channels shouldn’t fight each other
---
5. Throttle
Don’t hold constant throttle
Causes drift and overcorrection
Use micro throttle pulses
Better altitude hold
Memorize throttle mid
Your altitude “zero”
---
6. Body Tension
Relax shoulders → reduces finger tremor
Breathing: short exhale before a tricky move
Support elbows/palms → added stability
---
7. Tuning for Physiomotor Control
Expo 0.2–0.4 → finer center control
Lower center sensitivity → less twitchiness
Don’t overdo feedforward → avoids nervous feel
---
8. Anti-Tremor
Before flying:
warm up fingers (30–60 s)
a few dry stick movements
If you’re shaky: → fly 2–3 slow circles
→ nervous system stabilizes
---
9. Simulator as a Tool
10–15 min daily > 2 hours once a week
train slow flight, not speed
practice clean lines, not tricks
---
10. Core Principle
If you’re correcting often — you’re already late.
Solution: → fewer inputs
→ more prediction
→ consistent rhythm
#FPV #FPVDrone #DroneControl #MicroControl #PrecisionFlying #DronePiloting #FPVFreestyle #FPVRacing #StickControl #FineMotorSkills #HandEyeCoordination #Sensorimotor #FlightControl #DroneSkills #FPVTraining #DroneSimulator #ThrottleControl #PIDTuning #RCControl #AerialControl #DroneTech #LowLatency #Feedforward #ExpoSettings #ControlTheory


CRTI 2.2 – An Anisotropic Matrix Framework for Directional Stability Analysis in Complex Adaptive Systems This publication presents CRTI 2.2 (Compression–Resonance Tension Index), a matrix-based extension of the previously introduced scalar diagnostic (CRTI 2.1). The framework provides a mathematically consistent method for analyzing directional instability in complex adaptive systems using linear algebra and control-theoretic stability analysis. Historical Development The original scalar formulation (CRTI 2.1) defined systemic tension as: T = R / Φ where: R represents structural rigidity (exploitation dominance), Φ represents feedback permeability (exploration capacity). While analytically useful, the scalar index implicitly assumes isotropy — treating systemic stress as directionally uniform. Empirical observations in governance, economic, and institutional systems indicate that instability is often anisotropic: rigidity may emerge in a specific structural pillar while other dimensions remain adaptive. CRTI 2.2 resolves this limitation by introducing a matrix formulation: T = R Φ^{-1} where R and Φ are defined as diagonal (or, optionally, fully coupled) matrices. This eliminates the rank-1 degeneracy of earlier outer-product approaches and allows independent directional stability analysis. The model is embedded into a state-space representation: x_dot = (A − T)x + Bu System stability is determined by the eigenvalues of (A − T). Instability occurs when the largest real eigenvalue crosses into the right-half complex plane. This provides a formal spectral threshold for directional loss of adaptive capacity. Core Contributions CRTI 2.2 introduces: Resolution of scalar isotropy limitations Elimination of rank-1 degeneracy Eigenvalue-based directional stability diagnostics A falsifiable framework linked to measurable proxies A minimal reproducible simulation (Annex A) Operationalization The framework proposes empirically measurable proxies for: Structural Rigidity (R_i): Budget stickiness Policy inertia Citation homogeneity Feedback Permeability (Φ_i): Reallocation latency Dissent throughput Error-correction speed As λ_max(A − T) approaches zero from below, systems exhibit measurable critical slowing down and reduced variance absorption. Repository Contents Full Manuscript (Journal Layout + Integrated Version) Annex A: Minimal Reproducible Python Simulation Proxy Template for empirical data collection README documentation Intended Audience Researchers in: Complexity Science Control Theory Systems Theory Governance Modeling Economic Stability Analysis Cybernetics CRTI 2.2 is designed as a diagnostic framework rather than a normative theory. It provides a structural method for analyzing directional instability without metaphoric or speculative extensions. 🏷 Optimized Scientific Keywords (15) Complex Adaptive Systems Directional Stability Anisotropic Dynamics Control Theory State-Space Modeling Eigenvalue Analysis Matrix Dynamics Systemic Risk Feedback Permeability Structural Rigidity Governance Stability Spectral Analysis Nonlinear Systems Early Warning Signals CRTI
🤯 The Braingeneers at UC Santa Cruz have blown our minds again: researchers trained brain organoids — tiny pieces of brain tissue grown in the lab — to solve a goal-directed task.
Associated with the UC Santa Cruz Genomics Institute, the team coached the organoids to solve the cart-pole balancing problem, a classic benchmark in #robotics, #controltheory, and #AI used to test whether a system can process information and adapt in real time.
definitely in the top 5 papers that stand out as introducing eerily prescient pre 20th century equations!
`Jacopo Francesco Riccati (28 May 1676 – 15 April 1754) was a Venetian mathematician and jurist from Venice, known for his widely influential work on solving differential equations. He is best known for having studied the equation that bears his name. `
https://en.wikipedia.org/wiki/Jacopo_Riccati
#mathematics #JacopoRiccati #Riccati RiccatiEquation #controlTheory
We are entering the “always-on personal agent” phase.
Tools like OpenClaw promise a local AI that lives your devices and in your tools.
Persistent. Routed. Autonomous. That sounds powerful. It should also make you uncomfortable.
I’m less worried about “AI taking over.” I’m worried about something more structural: Loss of observable feedback.
A Thread 🧵
#SystemsThinking #AI #ControlTheory #WorkFeedbackLoop #openclaw
(1/6)

