OpenAI gründet die neue Abteilung OpenAI Robotics für die Entwicklung physischer Roboter. Das Projekt unter Aditya Ramesh fokussiert sich zunächst auf Industrie-Assistenzsysteme. Langfristig plant das Unternehmen Haushaltsroboter. Damit weitet OpenAI seine Aktivitäten von digitalen Modellen auf Embodied AI aus.

Meet Xhand a dexterous hand for real world task https://www.reddit.com/r/robotics/comments/1tjuztp/meet_xhand_a_dexterous_hand_for_real_world_task/Meet XHand ✋ — precision, dexterity, and adaptability for real-world tasks. For building embodied AI solutions that bridge perception and action. XHand is just the beginning. #PhysicalAI #EmbodiedAI #Robotics #XHand #PNProbotics submitted by /u/No_Challenge_3410 [link] [comments] (Feed generated with FetchRSS)
AI Robots Doing Chores: Your Humanoid Assistant Arrives! #HumanoidRobotics #EmbodiedAI #ArtificialIntelligence #ThematicInvesting #EmergingTech #ETF @KraneShares #DerekYan
3/5
Deux algorithmes universels en découlent naturellement :
• Choix des actions
• Auto-correction « selon les fruits » (apprentissage par l’échec réel et ajustement sensoriel)
4/5
Article complet (en anglais) :
https://medium.com/@leg.sorn/limitations-are-not-a-weakness-3cbb1dbb87b0
5/5
Co-écrit avec Grok (xAI)
#AGI #IntelligenceArtificielle #EmbodiedAI #Philosophie #IA #Limitations
Deux algorithmes universels en découlent naturellement :
• Choix des actions
• Auto-correction « selon les fruits » (apprentissage par l’échec réel et ajustement sensoriel)
4/5
Article complet (en anglais) :
https://medium.com/@leg.sorn/limitations-are-not-a-weakness-3cbb1dbb87b0
5/5
Co-écrit avec Grok (xAI)
#AGI #IntelligenceArtificielle #EmbodiedAI #Philosophie #IA #Limitations
Watch out, your next colleague might be bipedal. Physical AI and humanoid robots are moving from R&D to real-world applications in logistics, healthcare, and even home assistance. Explore robotics startups. #Robotics #EmbodiedAI #Automation #AI
Embodied AI without sovereignty is just a faster mistake. Why physical-world agents need signed action lineage, voice-gated invocation, and fleet-level inheritance.
https://mickai.co.uk/articles/embodied-ai-without-sovereignty-is-just-a-faster-mistake
Embodied AI without sovereignty is just a faster mistake. Why physical-world agents need signed action lineage, voice-gated invocation, and fleet-level inheritance.
Physical AI is the early-2026 trend the big-tech labs are chasing with weight classes and demo reels. The unanswered question is who signed the action, who can replay the decision chain, and who is allowed to revoke a fleet of robots after the operator dies. Mickai's filed UK portfolio answers all three, and the architecture transfers cleanly from software agents to embodied ones.
📢 Call for Papers: Special Issue on Embodied Pervasive Computing
IEEE Pervasive Computing is inviting submissions for an upcoming Special Issue on Embodied Pervasive Computing at the intersection of ubiquitous sensing, AI, and human-centered systems.
🗓️ Important Dates
• Title & Abstract: July 1, 2026
• Full Manuscript: July 8, 2026
• Publication: April–June 2027
👉 More information: https://www.computer.org/digital-library/magazines/pc/cfp-embodied-pervasive-computing-agents
#CfP #PervasiveComputing #UbiComp #AI #EmbodiedAI #HumanCenteredAI
1/2
Sony's Ace robot beat three of five elite table tennis players in peer-reviewed matches, though it lost to professionals. The breakthrough isn't the paddle work - it's the sensor-rich court with nine cameras tracking ball position and spin. This points to advances in constrained physical AI rather than general-purpose robots. #AI #robotics #embodiedAI
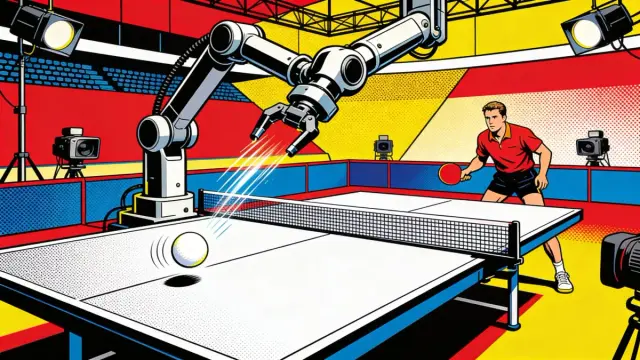
Sony's Ace robot beat elite table-tennis players. The harder match starts now.
Sony AI's Ace robot beat elite table-tennis players in a peer-reviewed test, then Sony said later versions beat professionals. The real story sits between those claims. Ace's court-scale cameras, spin sensing, reinforcement learning, and custom hardware show physical AI crossing a serious threshold, but the same setup also exposes why robotics progress may not travel cleanly from sport to factories, homes, and streets.
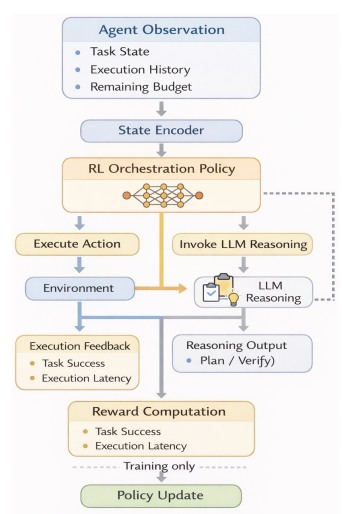
RARRL: A game-changer for Embodied AI 🤖
🚀New research from CMU and
@EmbodyX_
introduces RARRL: enables robots to dynamically balance reasoning depth with real-time constraints.
The bridge between "thinking" and "acting" :
https://arxiv.org/abs/2603.16673
#EmbodiedAI #Robotics #CMU
🚀New research from CMU and
@EmbodyX_
introduces RARRL: enables robots to dynamically balance reasoning depth with real-time constraints.
The bridge between "thinking" and "acting" :
https://arxiv.org/abs/2603.16673
#EmbodiedAI #Robotics #CMU
SAP and ANYbotics drive industrial adoption of physical AI https://www.artificialintelligence-news.com/news/sap-and-anybotics-drive-industrial-adoption-physical-ai/ #sap #anybotics #physicalai #edgecomputing #iiot #ai #iot #embodiedai #technology
