fly51fly (@fly51fly)
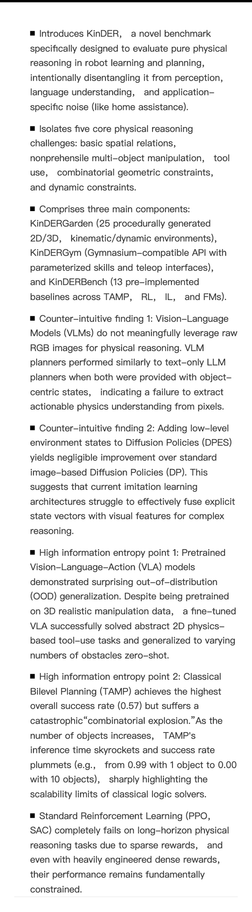
로봇 학습과 계획을 위한 물리적 추론 벤치마크 KinDER가 소개되었습니다. 로봇이 물리 세계를 이해하고 계획하는 능력을 평가하기 위한 새로운 테스트셋/벤치마크로, 로보틱스와 embodied AI 연구에 중요한 자료가 될 수 있습니다.
https://x.com/fly51fly/status/2051055759740608843
#robotics #benchmark #physicalreasoning #robotlearning #planning