An RC Tank Chassis That’s Not Messing About https://hackaday.com/2023/12/26/an-rc-tank-chassis-thats-not-messing-about/ #TransportationHacks #hoverboardmotor #TankTracks #tank

https://www.themself.org/2008/03/tank_tracks_peter_beale/?utm_source=ReviveOldPost&utm_medium=social&utm_campaign=ReviveOldPost #armour #bookreview #history #military #peterbeale #royaltankregiment #rtr #tanktracks #walcheren #worldwarii #ww2

Tank Tracks, Peter Beale - Themself
This is the story of 9 RTR in WW2 written by one of its officers and including material from many of the survivors and contemporary diaries, including the battalion war diary, the brigade history and at one point the radio logs. It is packed with a wealth of material, much of which is directly quoted from a primary source. If you want a feel for what life was like for a heavy tank battalion then this is the book to read. The stories told by the survivors and in the diaries don’t pull any punches, and some of what is described is quite horrific, many of the casualties in the battalion are well documented and the nature of the injuries suffered by tank crews tend to be severe. The battalion re-formed in [late 1940/l941] and was one of the first to be equipped with Churchills. It trained in […]
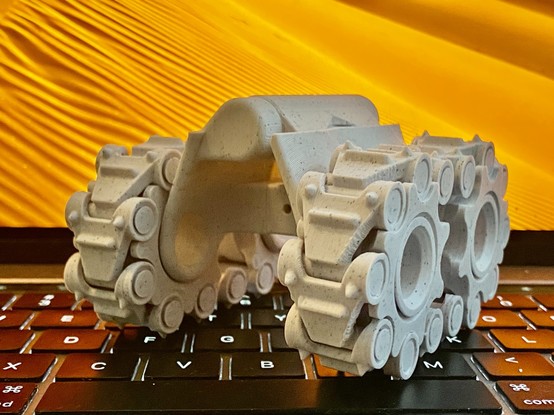
I #3dprinted the awesome print-in-place tank model from 3dhonza! Really happy with how this came out. (Model is free for a limited time at https://www.3dhonza.com/)

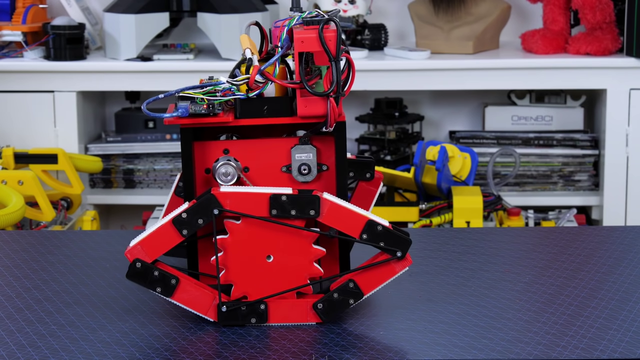
Rover Uses Different Kind Of Tracks
Tracked robots usually require at least two wheels inside to work properly. However, [James Bruton] discovered a curious tractor design from the 1940s, the Fordson Rotaped, which only uses a single sprocket wheel inside each track. Being [James], he built a self-balancing robot around the rotaped concept.
Instead of a lot of short track sections, the Rotaped uses six long sections of track, about the same length as the wheel's diameter. To keep the track on the wheel, a series of chains or an oval frame is used on the inside of the track.
As is usual for [James]' projects, most of the mechanical parts are 3D printed. To hold the tracks in place, he stretches a bungee cord loop around three points on each side of the track. To make things more interesting, he made the robot balanced on the tracks. This took a bit of PID tuning to get working without oscillations, since the wheels experience a slight cogging effect inside the tracks. The wheels are driven by a pair of brushless motors with O-Drive controllers. The balancing is handled by an Arduino Mega, which reads processed position values from an Arduino Pro Mini connected to an MPU6050 IMU.
This might be a viable alternative to conventional tracks for certain applications, and the reduced part count is certainly an advantage. Let us know in the comments if it spawns any ideas. [James] has previously built another tracked rover, which uses flexible 3D printed track sections. By far, the biggest 3D printed tracked vehicle we've seen was [Ivan Miranda]'s ridable tank.
#robotshacks #3dprinted #balancingrobot #jamesbruton #tanktracks