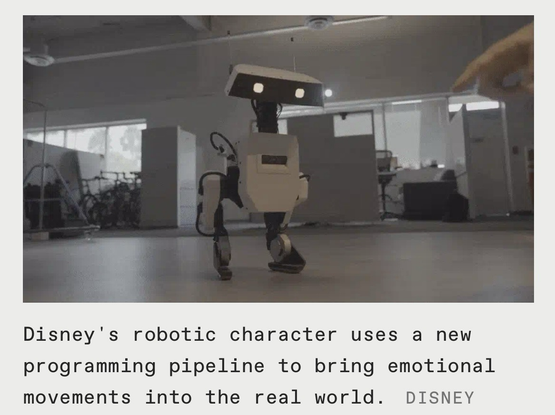
Am Mittwoch präsentierte ein Forschungsteam von #Disney auf der IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2023 in Detroit einen brandneuen Robotercharakter während ihrer Abend-Keynote.
#robot #roboter #iros2023 #robots