Rohan Paul (@rohanpaul_ai)
OpenClaw은 로봇용 실시간 3D 추론 시스템으로 Unitree G1에서 동작한다. 동적 복셀 맵을 생성해 객체와 시간적 변화를 추적하고, 임베딩된 공간 표현으로 복잡한 시공간 질의(딥 스페이셜 쿼리)를 지원한다. 드론과 사족보행 로봇(퀘드러페드)에 적합한 지각 솔루션으로 로봇 인식 및 내비게이션 향상을 목표로 한다.
Rohan Paul (@rohanpaul_ai)
OpenClaw은 로봇용 실시간 3D 추론 시스템으로 Unitree G1에서 동작한다. 동적 복셀 맵을 생성해 객체와 시간적 변화를 추적하고, 임베딩된 공간 표현으로 복잡한 시공간 질의(딥 스페이셜 쿼리)를 지원한다. 드론과 사족보행 로봇(퀘드러페드)에 적합한 지각 솔루션으로 로봇 인식 및 내비게이션 향상을 목표로 한다.
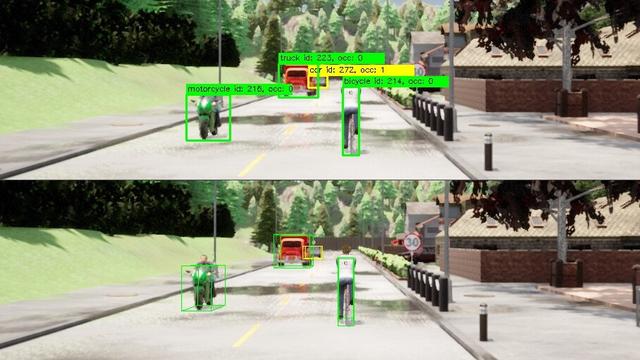
ICYMI ➡️ Towards reliable open-source #3Dperception: using #Carlafox to automatically generate an error-free synthetic dataset: https://col.la/ros3d
#OpenSource #DataVisualization #AutonomousDriving #AI #MachineLearning #ComputerVision #MachineVision
New blog post! Using #Carlafox to automatically generate an error-free synthetic dataset for #3Dperception: https://col.la/ros3d
#OpenSource #DataVisualization #AutonomousDriving #AI #MachineLearning #ComputerVision #MachineVision