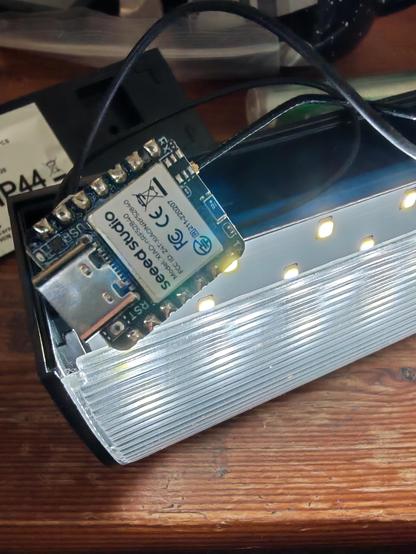
Ça y est, j'ai fait mon premier nœud solaire #meshtastic
Un #seeedstudio #xiao #nRF52840 avec un #SX126
Ça y est, j'ai fait mon premier nœud solaire #meshtastic
Un #seeedstudio #xiao #nRF52840 avec un #SX126
reComputer RK3576/RK3588 Edge AI computers are supported by reComputer AI Lab one-click deployment platform

Seeed Studio has just launched the reComputer RK3576/RK3588 Edge AI computers designed for developers, embedded AI innovators, robotics, industrial AI, vision AI, local LLMs, and real-world edge deployment. Rockchip RK3576 and RK3588 computers are pretty common these days, and the Seeed Studio models offer triple video output, dual Ethernet (GbE or 2.5GbE), several USB ports, and M.2 expansion. But the most interesting part is probably the software with Armbian-based Linux OS and support for the reComputer AI Lab platform that enables one-click deployment of AI-accelerated computer vision, audio, and LLM/LVM demos. reComputer RK3576/RK3588 specifications: SoC (one or the other) Rockchip RK3576 Octa-core CPU - 4x Cortex-A72 cores at 2.2GHz, 4x Cortex-A53 cores at 1.8GHz GPU – ARM Mali-G52 MC3 GPU NPU – 6 TOPS (INT8) AI accelerator with support for INT4/INT8/INT16/BF16/TF32 mixed operations. VPU Video Decoder: H.264, H.265, VP9, AV1, and AVS2 up to 8K at 30fps or 4K at
The #seeedstudio Wio Tracker L1 Pro is not a cheap $30 Heltec v3 #meshtastic node.
It has a 5 day battery (about 6x longer than the Heltec), and a GPS.
Pro: $62 after tax & shipping
Standard + battery + case: $57
If bought in batches of 10: $40/ea (includes cost of battery & case). So if you and 9 friends want to pool together $400, it's a pretty comparable price to the el' cheapo gear.
If price is the only metric that matters, the XIAO might be of interest.
RE: https://infosec.exchange/@seanwbruno/116524367919999666
Ah, have you had the pleasure of #jetsonOrinNX + #seeedstudio reComputer hardware! A cornucopia of hackery!
ESP-FLY micro drone kit offers ESP32-S3-based flight control and ESP-NOW support

ESP-FLY DIY Kit is a tiny ESP32-S3-based DIY micro drone kit

ESP-FLY DIY kit is a miniature DIY drone kit based on Seeed Studio's XIAO ESP32-S3 board that was initially introduced as a DIY project on Instructables by Max Imagination, but is now available as a complete kit for $59.99 on Seeed Studio. It's certainly not the first ESP32 drone, but the ESP-FLY drone must be the smallest, as the miniature (67 x 67 x 31mm) quadcopter design allows users to store into any pocket or small boxes. It's mainly designed for STEM education, hobbyist DIY Projects, and indoor flight practice. ESP-FLY drone kit key features and specifications: Main Controller - Seeed Studio XIAO ESP32-S3 board Wireless MCU – Espressif Systems ESP32-S3R8 CPU - Dual-core Tensilica LX7 microcontroller @ 240 MHz System Memory - 512KB SRAM, 8MB PSRAM Wireless - Wi-Fi 4 & Bluetooth 5.0 dual-mode (Classic + BLE) connectivity Storage – 8MB SPI flash Antenna – External u.FL antenna USB
Announcing TinyGo 0.41 with ESP32 wireless support, @arduino UNO Q, a bunch of new @seeedstudio XIAO boards, and much more!
https://tinygo.org/blog/2026/tinygo-0-41-the-big-release/
#tinygo #golang #arduino #espressif #seeedstudio #esp32 #xiao #wasm
reBot Arm B601-DM – An open-source 6+1 DoF robotic arm for embodied AI and teleoperation applications

Seeed Studio reBot Arm B601-DM is a fully open-source 6-axis robotic arm (plus a parallel gripper) designed to lower the barrier to entry for embodied AI learning and teleoperation. Built around high-performance Damiao actuators, the arm offers up to 767mm of reach, a 1.5kg payload capacity, and high-precision 0.2mm repeatability. Designed for researchers and robotics developers, the B601-DM is compatible out of the box with major AI and robotics frameworks, including ROS 1/2, Hugging Face’s LeRobot, NVIDIA Isaac Sim, and Pinocchio. Seeed Studio reBot Arm B601-DM specifications: Communication – CAN bus @ 1Mbps) and UART @ 921600bps Degrees of Freedom (DOF) – 6-axis arm + 1 parallel gripper Motors / Actuators – 7x Damiao motors 4x DAMIAO 4310 (DM-J4310-2EC) 3x DAMIAO 4340P (DM-J4340P-2EC) high-torque motors Payload – 1.5kg (without gripper, at recommended 70% reach) Reach – 767mm (with gripper), 607mm (without gripper) Repeatability – < 0.2 mm Joint torque and
 🐰
🐰
