Robot Learning with Super-Linear Scaling
Authors: Marcel Torne, Arhan Jain, Jiayi Yuan, Vidaaranya Macha, Lars Ankile, Anthony Simeonov, Pulkit Agrawal, Abhishek Gupta
pre-print -> https://arxiv.org/abs/2412.01770v1
website -> https://casher-robot-learning.github.io/CASHER/
#robotics #rl #reinforcement_learning #data_generation #real2sim2real

Robot Learning with Super-Linear Scaling
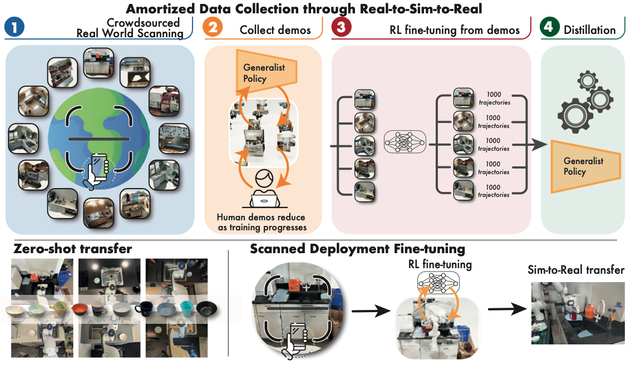
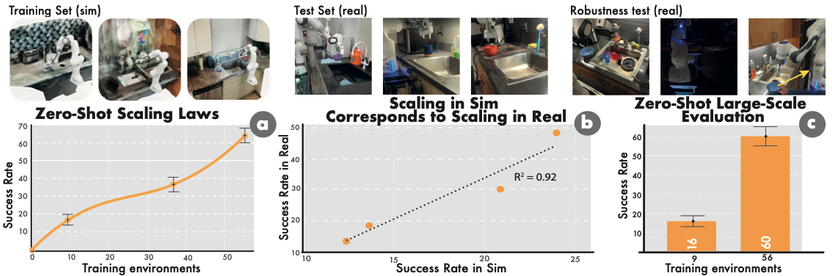
Scaling robot learning requires data collection pipelines that scale favorably with human effort. In this work, we propose Crowdsourcing and Amortizing Human Effort for Real-to-Sim-to-Real(CASHER), a pipeline for scaling up data collection and learning in simulation where the performance scales superlinearly with human effort. The key idea is to crowdsource digital twins of real-world scenes using 3D reconstruction and collect large-scale data in simulation, rather than the real-world. Data collection in simulation is initially driven by RL, bootstrapped with human demonstrations. As the training of a generalist policy progresses across environments, its generalization capabilities can be used to replace human effort with model generated demonstrations. This results in a pipeline where behavioral data is collected in simulation with continually reducing human effort. We show that CASHER demonstrates zero-shot and few-shot scaling laws on three real-world tasks across diverse scenarios. We show that CASHER enables fine-tuning of pre-trained policies to a target scenario using a video scan without any additional human effort. See our project website: https://casher-robot-learning.github.io/CASHER/
GAPartManip: A Large-scale Part-centric Dataset for Material-Agnostic Articulated Object Manipulation
Authors: Wenbo Cui, Chengyang Zhao, Songlin Wei, Jiazhao Zhang, Haoran Geng, Yaran Chen, He Wang
pre-print -> https://arxiv.org/abs/2411.18276
#robotics #articulated_objects #manipulation #dataset #synthetic_data #data_generation
GAPartManip: A Large-scale Part-centric Dataset for Material-Agnostic Articulated Object Manipulation
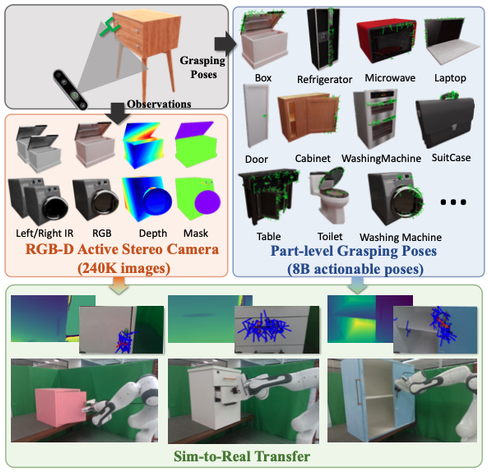
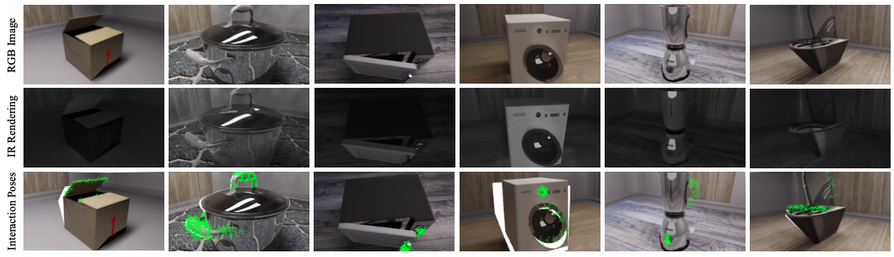
Effectively manipulating articulated objects in household scenarios is a crucial step toward achieving general embodied artificial intelligence. Mainstream research in 3D vision has primarily focused on manipulation through depth perception and pose detection. However, in real-world environments, these methods often face challenges due to imperfect depth perception, such as with transparent lids and reflective handles. Moreover, they generally lack the diversity in part-based interactions required for flexible and adaptable manipulation. To address these challenges, we introduced a large-scale part-centric dataset for articulated object manipulation that features both photo-realistic material randomization and detailed annotations of part-oriented, scene-level actionable interaction poses. We evaluated the effectiveness of our dataset by integrating it with several state-of-the-art methods for depth estimation and interaction pose prediction. Additionally, we proposed a novel modular framework that delivers superior and robust performance for generalizable articulated object manipulation. Our extensive experiments demonstrate that our dataset significantly improves the performance of depth perception and actionable interaction pose prediction in both simulation and real-world scenarios. More information and demos can be found at: https://pku-epic.github.io/GAPartManip/.
Evaluating Text-to-Image Diffusion Models for Texturing Synthetic Data
Authors: Thomas Lips, Francis wyffels
pre-print -> https://arxiv.org/abs/2411.10164
code -> https://github.com/tlpss/diffusing-synthetic-data
#robotics #diffusion #sim2real #data_generation
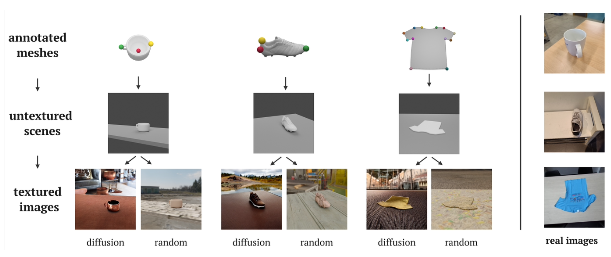
Evaluating Text-to-Image Diffusion Models for Texturing Synthetic Data
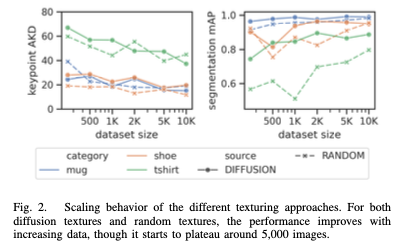
Building generic robotic manipulation systems often requires large amounts of real-world data, which can be dificult to collect. Synthetic data generation offers a promising alternative, but limiting the sim-to-real gap requires significant engineering efforts. To reduce this engineering effort, we investigate the use of pretrained text-to-image diffusion models for texturing synthetic images and compare this approach with using random textures, a common domain randomization technique in synthetic data generation. We focus on generating object-centric representations, such as keypoints and segmentation masks, which are important for robotic manipulation and require precise annotations. We evaluate the efficacy of the texturing methods by training models on the synthetic data and measuring their performance on real-world datasets for three object categories: shoes, T-shirts, and mugs. Surprisingly, we find that texturing using a diffusion model performs on par with random textures, despite generating seemingly more realistic images. Our results suggest that, for now, using diffusion models for texturing does not benefit synthetic data generation for robotics. The code, data and trained models are available at \url{https://github.com/tlpss/diffusing-synthetic-data.git}.
RoboGSim: A Real2Sim2Real Robotic Gaussian Splatting Simulator
Authors: Xinhai Li, Jialin Li, Ziheng Zhang, Rui Zhang, Fan Jia, Tiancai Wang, Haoqiang Fan, Kuo-Kun Tseng, Ruiping Wang
pre-print -> https://arxiv.org/abs/2411.11839
website -> https://robogsim.github.io
#robotics #manipulation #data_generation #sim2real #real2sim #real2sim2real

RoboGSim: A Real2Sim2Real Robotic Gaussian Splatting Simulator
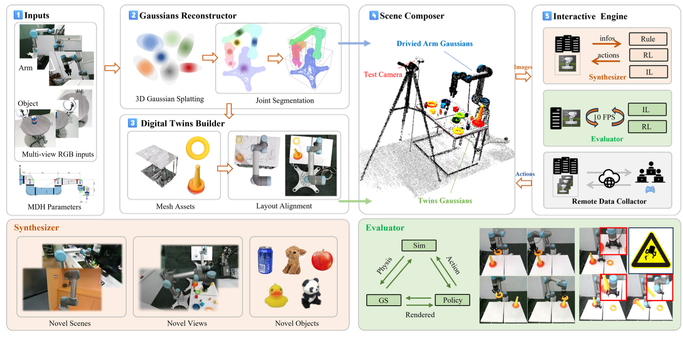
Efficient acquisition of real-world embodied data has been increasingly critical. However, large-scale demonstrations captured by remote operation tend to take extremely high costs and fail to scale up the data size in an efficient manner. Sampling the episodes under a simulated environment is a promising way for large-scale collection while existing simulators fail to high-fidelity modeling on texture and physics. To address these limitations, we introduce the RoboGSim, a real2sim2real robotic simulator, powered by 3D Gaussian Splatting and the physics engine. RoboGSim mainly includes four parts: Gaussian Reconstructor, Digital Twins Builder, Scene Composer, and Interactive Engine. It can synthesize the simulated data with novel views, objects, trajectories, and scenes. RoboGSim also provides an online, reproducible, and safe evaluation for different manipulation policies. The real2sim and sim2real transfer experiments show a high consistency in the texture and physics. Moreover, the effectiveness of synthetic data is validated under the real-world manipulated tasks. We hope RoboGSim serves as a closed-loop simulator for fair comparison on policy learning. More information can be found on our project page https://robogsim.github.io/ .
SkillMimicGen: Automated Demonstration Generation for Efficient Skill Learning and Deployment
Authors: Caelan Garrett, Ajay Mandlekar, Bowen Wen, Dieter Fox
pre-print -> https://arxiv.org/abs/2410.18907
website -> https://skillgen.github.io
#robotics #skill_learning #data_generation #manipulation #long_horizon
SkillMimicGen: Automated Demonstration Generation for Efficient Skill Learning and Deployment
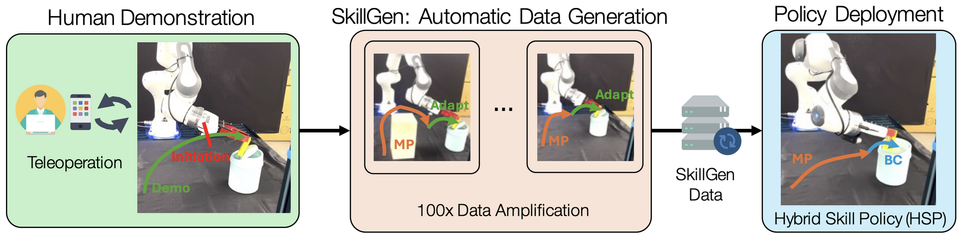
Imitation learning from human demonstrations is an effective paradigm for robot manipulation, but acquiring large datasets is costly and resource-intensive, especially for long-horizon tasks. To address this issue, we propose SkillMimicGen (SkillGen), an automated system for generating demonstration datasets from a few human demos. SkillGen segments human demos into manipulation skills, adapts these skills to new contexts, and stitches them together through free-space transit and transfer motion. We also propose a Hybrid Skill Policy (HSP) framework for learning skill initiation, control, and termination components from SkillGen datasets, enabling skills to be sequenced using motion planning at test-time. We demonstrate that SkillGen greatly improves data generation and policy learning performance over a state-of-the-art data generation framework, resulting in the capability to produce data for large scene variations, including clutter, and agents that are on average 24% more successful. We demonstrate the efficacy of SkillGen by generating over 24K demonstrations across 18 task variants in simulation from just 60 human demonstrations, and training proficient, often near-perfect, HSP agents. Finally, we apply SkillGen to 3 real-world manipulation tasks and also demonstrate zero-shot sim-to-real transfer on a long-horizon assembly task. Videos, and more at https://skillgen.github.io.
GARField: Addressing the visual Sim-to-Real gap in garment manipulation with mesh-attached radiance fields
Authors: Donatien Delehelle, Darwin G. Caldwell, Fei Chen
pre-print -> https://arxiv.org/abs/2410.05038
website -> https://ddonatien.github.io/garfield-website/
#robotics #deformable_manipulation #garment_manipulation #NeRF #deep_learning #synthetic_data #data_generation #real2sim
GARField: Addressing the visual Sim-to-Real gap in garment manipulation with mesh-attached radiance fields
While humans intuitively manipulate garments and other textile items swiftly and accurately, it is a significant challenge for robots. A factor crucial to human performance is the ability to imagine, a priori, the intended result of the manipulation intents and hence develop predictions on the garment pose. That ability allows us to plan from highly obstructed states, adapt our plans as we collect more information and react swiftly to unforeseen circumstances. Conversely, robots struggle to establish such intuitions and form tight links between plans and observations. We can partly attribute this to the high cost of obtaining densely labelled data for textile manipulation, both in quality and quantity. The problem of data collection is a long-standing issue in data-based approaches to garment manipulation. As of today, generating high-quality and labelled garment manipulation data is mainly attempted through advanced data capture procedures that create simplified state estimations from real-world observations. However, this work proposes a novel approach to the problem by generating real-world observations from object states. To achieve this, we present GARField (Garment Attached Radiance Field), the first differentiable rendering architecture, to our knowledge, for data generation from simulated states stored as triangle meshes. Code is available on https://ddonatien.github.io/garfield-website/