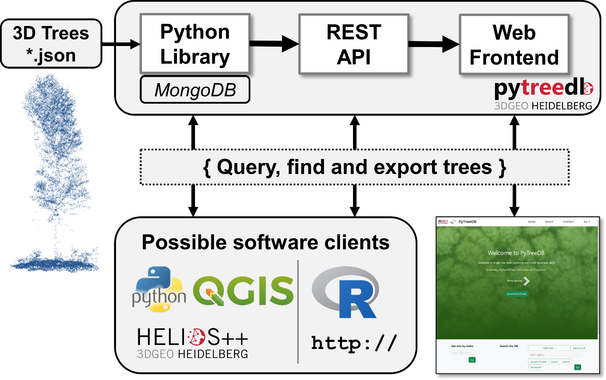
🔎 Our projects #4: 🌲 In #SYSSIFOSS we generate synthetic airborne laser scanning data of forests by combining forest information, individual tree point clouds & the HELIOS++ laser scanning simulator.
Collaboration with: 3DGeo Research Group Heidelberg
Funded by: @dfg_public 🌳
Collaboration with: 3DGeo Research Group Heidelberg
Funded by: @dfg_public 🌳