From forest stand information to laser scanning #pointclouds without a real scanner?
📢 📰 In our new paper by Schäfer et al. (https://doi.org/10.1093/forestry/cpad006) we generate realistic laser scanning data of forests by combining
➡️ forest stand information ℹ️
➡️ the #pytreedb tree point cloud database 🌳(https://pytreedb.geog.uni-heidelberg.de)
➡️ and the laser scanning simulator #HELIOS++ 🖥️(https://github.com/3dgeo-heidelberg/helios)
Such simulated data may be used in sensitivity analyses, for algorithm development, and for #machinelearning.
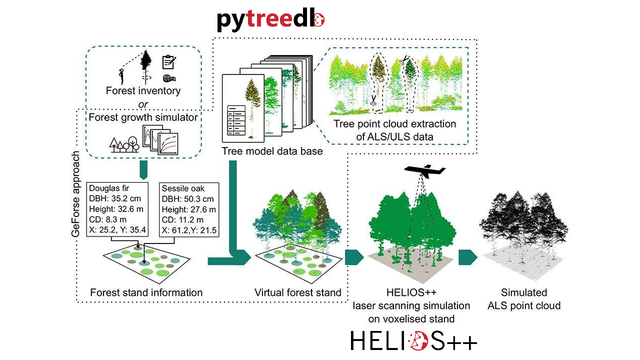

Generating synthetic laser scanning data of forests by combining forest inventory information, a tree point cloud database and an open-source laser scanning simulator
Abstract. Airborne laser scanning (ALS) data are routinely used to estimate and map structure-related forest inventory variables. The further development, refin