Ofc, the #rtk tool recommended to mess up human readable output of CLI to optimize for LLMs has built-in telemetry. Opt-in, but still: https://github.com/rtk-ai/rtk/blob/master/docs/TELEMETRY.md
At least, well documented.
Ofc, the #rtk tool recommended to mess up human readable output of CLI to optimize for LLMs has built-in telemetry. Opt-in, but still: https://github.com/rtk-ai/rtk/blob/master/docs/TELEMETRY.md
At least, well documented.
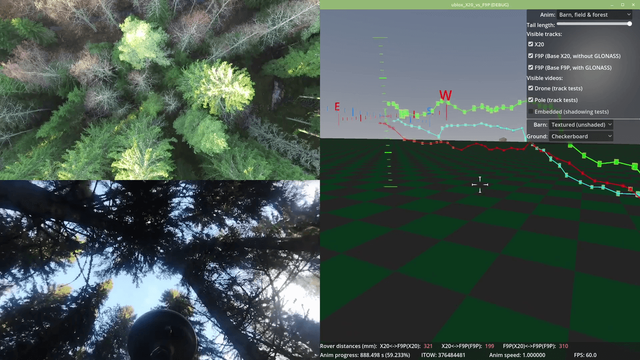
Making of MAD Projection (Demo for Instanssi 2026)

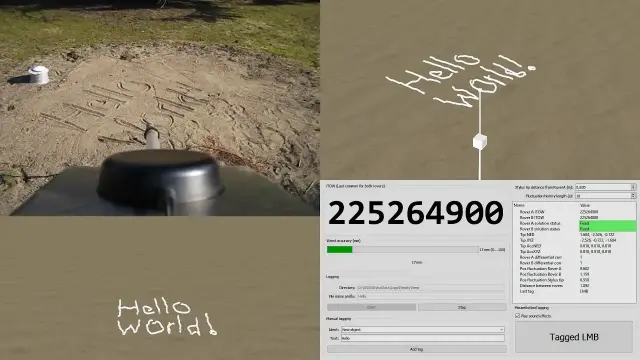
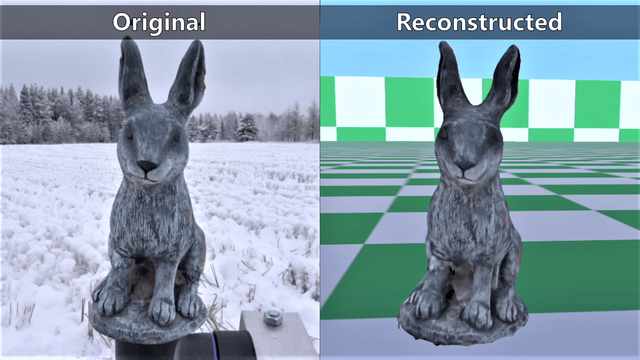
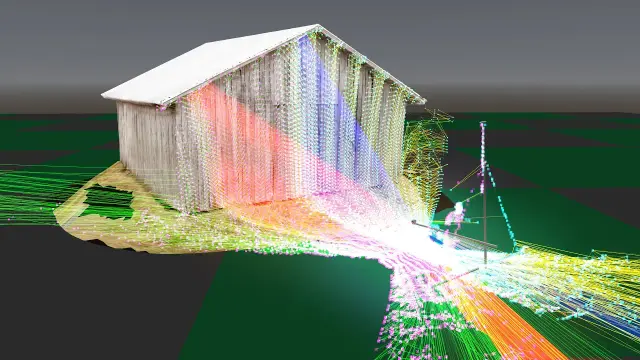
Scanning a 3D-object with "GNSS-stylus" utilizing 3 u-blox ZED-F9P modules (1 RTK-base and 2 rovers)
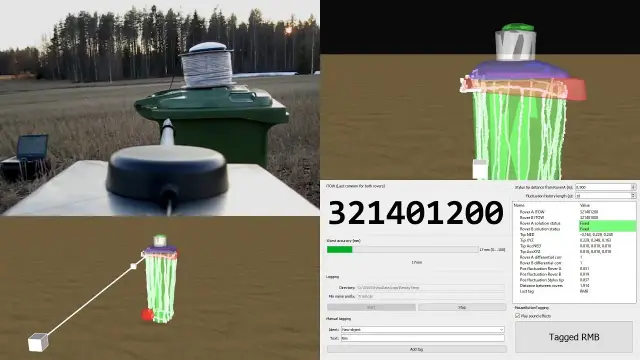
"GNSS-Stylus" using 3 u-blox ZED-F9P modules (1 RTK-base and 2 rovers)
Direct georeferencing 3D-scanner using rotating lidar and GNSS (="GPS")-devices (u-blox ZED-F9P)
Effects of a decaying geomagnetic storm on RTK-GNSS (u-blox ZED-F9P, about 20 km baseline)

Testing and comparing u-blox X20 and F9P GNSS-receivers (RTK)
3D-scanner using Livox Mid-360 lidars and GNSS (="GPS")-devices (u-blox ZED-F9P)
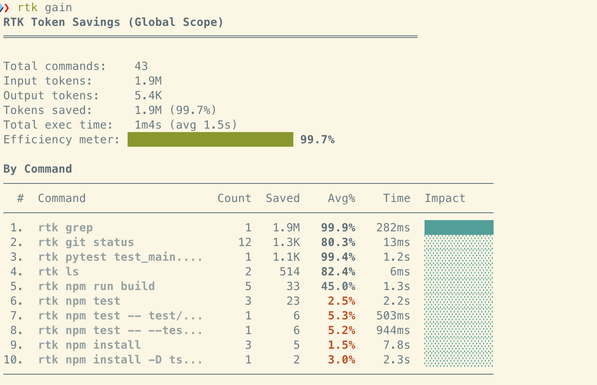
And with a little help from rtk, the token economy is incredible—as you can see in the image! 📉
It makes the whole experience much smoother, and the best part is that it’s a simple #opencode tool.
Сантиметры против метров: как RTK-контроллеры спасают инженеров от бессмысленных раскопок
Всем привет! Представьте типичную ситуацию: у вас на руках схема подземных коммуникаций с условными метками. На местности свежеуложенный асфальт, газон и пять потенциальных точек, где нужный колодец может быть в радиусе 5–10 метров — стандартной погрешности GPS. Что делаем? Копаем наугад, тратим часы, портим покрытие, нервничаем. Проблема не в том, что «карта неверная». Проблема в том, что у нас никогда не было инструмента, чтобы актуализировать ее с точностью до сантиметра. Традиционно такой разрыв закрывался человеко-часами и удачей. Но что делать если у вас под управлением сотни тысяч инфраструктурных объектов в условиях постоянно меняющейся городской среды? Меня зовут Оксана Эйнеш, я руковожу направлением «Высокоточное позиционирование» в МТС. И сегодня мы с вами разберем технологию, которая превращает поиск колодца подземной инфраструктуры из лотереи в точную инженерную задачу. Речь пойдет о комплексном решении с применением высокоточных ГНСС-контроллеров с поддержкой кинематики реального времени (Real Time Kinematic , RTK). Ниже я расскажу о переходе из плоскости «где-то здесь» к точке «вот здесь».
https://habr.com/ru/companies/ru_mts/articles/1003090/
#RTK #ГНССконтроллеры #высокоточное_позиционирование #геоданные #цифровой_двойник #GIS #управление_инфраструктурой #IoT #инженерные_системы #полевые_работы