Interesting - and I can see that.
So what would be a problem that is not our own invention?
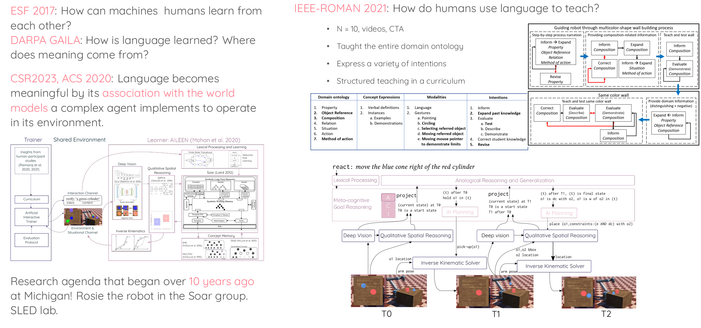
We are doing #language #NLP #ELP research in the context of #InteractiveTaskLearning #ITL or how can humans and machines learn from each other through natural interactions?
Do you have recommendations on what we could be studying?