[SubStack]
"Gabriele Romagnoli" (@)xraispotlight
#Gaussian_Splatting #Dioramix #3D
https://substack.com/@xraispotlight/note/c-271531795?r=1wcin3
Gabriele Romagnoli (@xraispotlight)
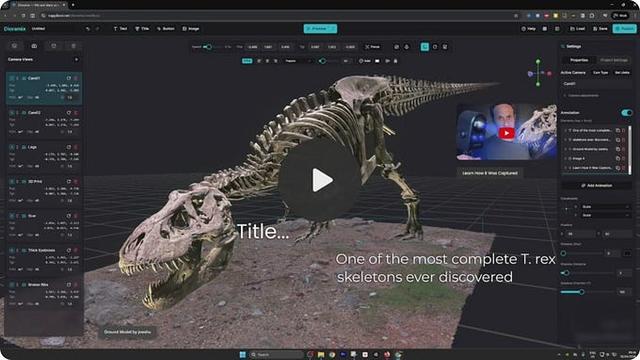
We need better tools to tell stories around #GaussianSplatting. That's why I liked what #Dioramix can do. A web-based editor to build interactive #3D presentations - Camera views act like slides - You have several options for text positioning and layouts - Add additional media types like images, videos or extra 3D models - Set button states based on your branding guidelines. Special thanks to Olli Huttunen for putting this together and giving me early access.
 Mogura VR
Mogura VR