https://www.portainer.io/blog/cve-2025-68121-and-docker#what-the-vulnerability-is
If you are running Docker Swarm in production today, this vulnerability creates some pressure to address your orchestration strategy.
https://www.portainer.io/blog/cve-2025-68121-and-docker#what-the-vulnerability-is
If you are running Docker Swarm in production today, this vulnerability creates some pressure to address your orchestration strategy.
SwarmPilot new features:
✨NEW in v1.1.0:
- Allows installation of docker swarm in "rootless mode" user namespace mode
- Traefik as an alternative installation Option for "Nginx Proxy Manager" as a reverse proxy
https://github.com/SuitDeer/SwarmPilot
#keepalived #docker #dockerswarm #syncthing #portainer #nginxproxymanager #traefik #opensource #ubuntu
This is a good overview of some of the pros and cons of #k3s and #dockerswarm
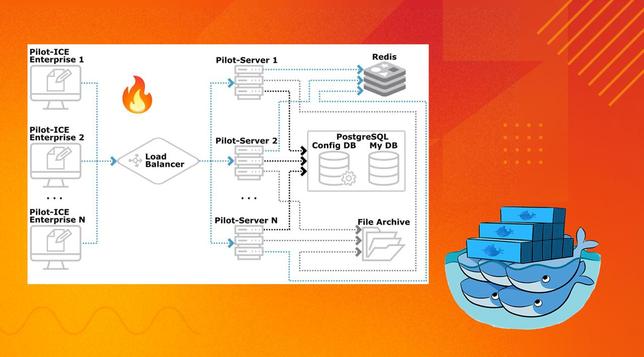
Как развернуть кластер среды общих данных Pilot: от теории к практике с Docker Swarm
Привет, друзья! Сегодня поговорим о кластерном режиме в Pilot – линейке продуктов, на базе которых организуют совместную работу над строительными проектами, сборку и проверку BIM-моделей. Кластерный режим Pilot обеспечивает отказоустойчивость и горизонтальное масштабирование её центрального компонента — Pilot-Server. Для хранения данных в кластере используется PostgreSQL, а для взаимодействия между узлами — Redis. Примечание: На данный момент кластеризация доступна только для Pilot-Server. Pilot-BIM-Server и Pilot-Web-Server работают как отдельные сервисы без возможности горизонтального масштабирования. Какие преимущества мы получаем по сравнению с подходом, где используется один компонент Pilot-Server? 1. Аппаратный сбой на сервере Pilot-Server. При падении машины, на которой расположен единственный экземпляр Pilot-Server, работа пользователей парализуется, никакие действия с системой в режиме онлайн невозможно совершить. При нескольких компонентах на разных серверах, в случае падения одного из них, мгновенно назначается новый активный узел из оставшихся рабочих. Для пользователей это будет кратковременный разрыв соединения, после которого они переподключатся к новому узлу. 2. Обновление ПО. При обновлении Pilot-Server с единственным экземпляром, пользователи не могут подключаться в этот момент. В кластерном режиме обновление можно произвести в режиме “Последовательного обновления”. 3. Рост нагрузки на Pilot-Server. Большое количество запросов к одному компоненту Pilot-Server может превысить пропускную способность одного сервера. В кластерном режиме за счёт нескольких узлов с Pilot-Server нагрузка будет распределяться между ними через балансировщик.
https://habr.com/ru/companies/ascon/articles/1011322/
#pilotbim #pilotice #pilotweb #кластеризация #postgresql #docker #dockerswarm #dockercompose
Es gibt scheinbar keine einfache storage Lösung für docker swarm, die, ähnlich wie longhorn, replizierten storage zur Verfügung stellt...
Hi everyone,
I want to show my small script (SwarmPilot) that I made for initializing a docker swarm cluster (up to 9 nodes) with the following features:
- keepalived: One IP address for the entire cluster
- syncthing: For volume replication between the nodes
- portainer: Web UI Management
- nginx proxy manager: Reverse Proxy
https://github.com/SuitDeer/SwarmPilot
#keepalived #docker #dockerswarm #syncthing #portainer #nginxproxymanager #opensource #ubuntu
Hi everyone,
I want to show my small script (SwarmPilot) that I made for initializing a docker swarm cluster (up to 9 nodes) with the following features:
- keepalived: One IP address for the entire cluster
- syncthing: For volume replication between the nodes
- portainer: Web UI Management
- nginx proxy manager: Reverse Proxy
https://github.com/SuitDeer/SwarmPilot
#keepalived #docker #dockerswarm #syncthing #portainer #nginxproxymanager #opensource
I am using a Docker Swarm cluster for my services at home and I am currently testing different storage solutions (volume replication). For that I wanted to test and measure the synchronization time (delay) between my docker swarm nodes.
For that testing I have build SyncWatch
I am using a Docker Swarm cluster for my services at home and I am currently testing different storage solutions (volume replication). For that I wanted to test and measure the synchronization time (delay) between my docker swarm nodes.
For that testing I have build SyncWatch