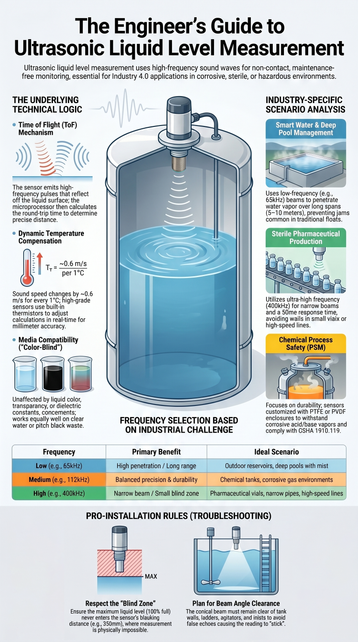
For ultrasonic distance/level sensing, reliability often hinges on the transducer, not just max range. It converts electrical → acoustic and echo → electrical. Many sensors can’t measure very close due to the dead zone / blind zone, driven by ringing (after-vibration) and transmit→receive blanking—early echoes get masked. When choosing, verify the minimum measurable distance plus frequency, sensitivity, and beam directivity.