Robotic vehicle expert William 'Red' Whittaker of Carnegie Mellon University had been involved with Lunacorp and the Icebreaker Discovery mission proposal, and now headed Astrobotic, our next GLXP team. Astrobotic persisted after the GLXP ended and is now part of the CLPS (Commercial Lunar Payload Services) program, one of a small number of teams who made that jump. We will spend more time on this interesting team beginning with their GLXP plans.
#moon #GLXP
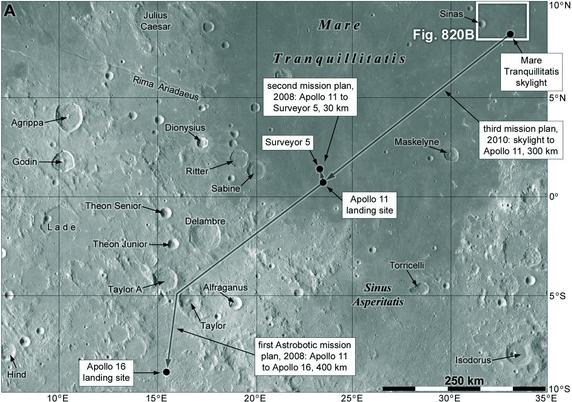
As initially described by Astrobotic, in a mission called ‘Tranquility Trek’ a lander named Artemis would deploy a rover called Red Rover about 500 m from the Apollo 11 LM descent stage near the 40th anniversary of that landing. The rover would in fact touch down just after the first lunar sunrise following the anniversary, on 26 or 27 July 2009. After examining the Apollo 11 site it would set off on a 300 km trek to the Apollo 16 site.
#moon #GLXP
#moon #GLXP
The Astrobotic mission plan evolved rapidly during the first year, soon shifting to a shorter ‘Tranquility Trek’ of about 30 km from the Apollo 11 site to Surveyor 5. An Astrobotic video in 2010 showed the rover landing near the Tranquillitatis skylight, driving to its edge to view the interior, and then driving 300 km to the Apollo 11 site to view sunset near the LM. The map shows these 3 suggested missions. Their plans went far beyond this, as we will see.
#maps #moon #GLXP
#maps #moon #GLXP
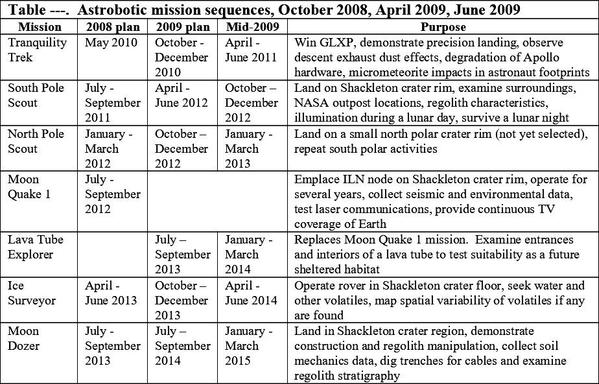
The rover missions we just looked at were for the first Astrobotic mission, to win the Google Lunar X Prize, but the team had ambitions far beyond that. This table lists several versions of their plans. The missions are more overtly for science or engineering development. Some might become Discovery or other NASA missions, others might support Constellation. The dates given are expected launch dates. This is only just becoming feasible today.
#moon #GLXP
#moon #GLXP
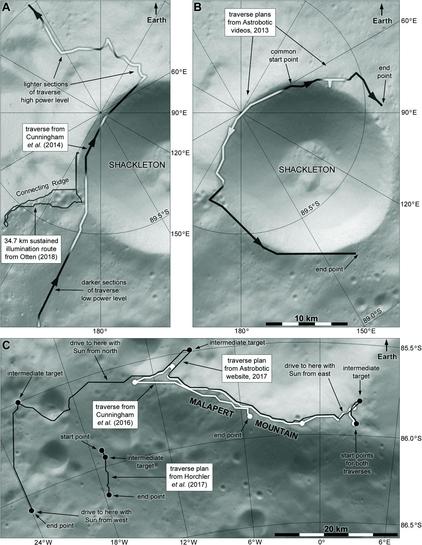
Astrobotic didn't just design rovers, they put an enormous effort into background research (e.g. chilling batteries in liquid nitrogen for lunar night survival). These maps show studies for polar missions, including power generation and traverse planning. This is only a glimpse at what they did, there is lots more. The 'sustained illumination route' is always in sunlight and they had other versions of it, farther from the pole.
#maps #moon #GLXP
#maps #moon #GLXP
The GLXP competition deadline was extended several times as funding difficulties continued. Tech optimism made some think that building a lander would be easy 40 years after Apollo, but it turns out there is a reason why space is expensive. Astrobotic amended its plans several times but they settled on exploring a skylight - a vertical entrance into a cave, especially a lava tube. The first examples were discovered in Japan's Kaguya mission data and LRO found more.
#moon #GLXP
#moon #GLXP
This map shows the site Astrobotic settled on, in a place ominously called Lacus Mortis. The white box shows the landing target (next post). An ellipse south of the box became the target when the pinpoint landing needed for a skylight mission seemed too difficult for a first landing attempt. This area is several hundred km north of Apollo 17 and Lunokhod 2.
#maps #moon #GLXP
#maps #moon #GLXP

Skylights have been of interest for years, but how would you go about exploring one? These maps illustrate Astrobotic's concept. The Lacus Mortis pits are mapped at top left. The eastern pit was chosen because it had a ramp of debris from a wall collapse. At lower left we see a scenario proposed by Kevin Peterson of Carnegie-Mellon (my version of his map is for the Tranquillitatis pit). The lander descent path flies over the pit for high resolution imaging...
#maps #moon #GLXP
#maps #moon #GLXP

... Then a rover drives to the pit and circles it, going as close as they dare to the rim at 2 places to look inside. Finally they circle back, looking in from several different vantage points. At right the actual target pit with its ramp on the east side is shown with a route illustrated by Red Whittaker. It's not clear if there is an accessible cave below those cliffs. There might be on the north side and the south side is in shadow. If only a rover could be sent into the pit...
#moon #GLXP
#moon #GLXP
Well, actually... Astrobotic's rover would not go into the pit but another team, Hakuto, of which more later, gave up on a lander and decided to fly its rover with Astrobotic for a subsidiary prize. Hakuto’s rover Moonraker would deploy a small secondary rover called Tetris which would attempt to descend into the Lacus Mortis pit on a tether. That would have been fun to watch.
#moon #GLXP
#moon #GLXP
The Google Lunar X Prize ended in 2018 when it became apparent that no team could launch before the oft-postponed deadline. Astrobotic had in fact already withdrawn to pursue launch opportunities outside the GLXP, and it retained the Lacus Mortis landing site but moved away from the skylight. A first mission would not be able to land precisely enough to put a pit within the short range expected for the rover. They moved to a place which could fit a larger ellipse...
#moon #GLXP
#moon #GLXP
... We are moving away from the GLXP but I want to show the connection between GLXP and CLPS. This map shows 2 versions of the new ellipse. Hakuto would still fly a rover on the new mission. Then CLPS came along. Astrobotic got a mission and still aimed for this site until late 2022 when NASA asked that it move to the plains west of the Gruithuisen domes. Their lander failed after launch in January 2024. But even that is not quite the end of the story.
#maps #moon #GLXP
#maps #moon #GLXP

A GLXP team, Hakuto, operated by a company called ispace, continued after the GLXP with funding raised by the company. It still considered Lacus Mortis to be its landing site for a while, probably closer to the skylight site than the larger ellipses. Eventually a new site selection process led by Jessica Flahaut and colleagues produced a new site list and Atlas crater was selected. The mission crashed near its target in April 2023.
#moon #GLXP
#moon #GLXP
I am working my way through the Catalogue of Teams for the Google Lunar X Prize, through the set of 10 teams announced in February 2008. The next is Chandah (Sanskrit for Moon), led by Adil Jafry. It made no public signs of progress until it was merged into Moon Express in 2010. The spacecraft would have been called Shehrezade.
Next up is Frednet. At first they suggested landing near an Apollo site. They got more specific on their website in 2009...
#moon #GLXP
... Frednet would use laser reflections from previously deployed reflectors as beacons to guide their landing. This limited their landings to the three Apollo sites with retroreflectors, Apollos 11, 14 and 15, and the two Lunokhod sites. By 2012 they were targeting one of the low latitude Apollo or Surveyor sites during descent. They would have 4 days of surface operations with a spherical rover before the end of 2015. The team withdrew from the competition at the end of 2013.
#moon #GLXP
#moon #GLXP
Our next GLXP team is Italia, an Italian team led by Amalia Ercoli-Finzi (Politecnico di Milano). Its spacecraft (both lander and rover) would be called Ascensio Machinae Ad Lunam Italica Arte (AMALIA), and might include one large rover or many small rovers. Exotic walking robot designs were circulated on the internet at first, but a more conventional wheeled rover was eventually chosen. The landing site was said to be near 0°, 0° in Sinus Medii.
#maps #moon #GLXP
#maps #moon #GLXP

Italia did some serious work, but not all teams were so productive. Lunatrex was founded by inventor and entrepreneur Pete Bitar. Its spacecraft, called Tumbleweed, might carry one or more rovers. It was dissolved in December 2009 because of an internal legal dispute and reappeared in modified form in 2010 as LUNARecon but left the competition very soon afterwards.
#moon #GLXP
#moon #GLXP
Another of the set of 10 teams introduced in February 2008 was Micro-Space, led by Richard Speck, who had plans for robotic and human lunar exploration using very light spacecraft. Micro-Space had also competed in the Ansari X PRIZE and the Northrop Grumman Lunar Lander Challenge. Their GLXP spacecraft was called the Human Lunar Lander as it was derived from their larger plan. Speck died in October 2010 and the team withdrew in November.
#moon #GLXP
#moon #GLXP
I am not aware of any work done by Micro-Space on landing sites, but I could be wrong (it depends what was made public, of course). They had some sort of connection with Open Luna, a group who pushed for the same goal and who did do some landing site work which I had some involvement in. But that is not really Micro-Space so I will skip it. The 'very light spacecraft' really were very light - open frames like a hang-glider with the suited astronaut perched on it. You go first!
#moon #GLXP
#moon #GLXP
Quantum 3, headed by Paul Carliner of Washington, D. C. and former NASA manager Courtney Stadd, withdrew later in 2008. The team had said it would land a spacecraft called Moondancer at an unspecified site in Mare Tranquillitatis. I don't know any more about them.
That leaves one more team from the first ten - which we will look at tomorrow. There's a bit more to say about them.
#moon #GLXP
The last of the February 2008 teams, the Southern California Selene Group (SCSG) was started by Harold Rosen, who had worked at Hughes on the first communication satellite, Syncom, in the 1960s. He had promoted a spin-stabilized lander for the Surveyor program, a design which was rejected in favour of the three-axis-stabilized tripod Surveyor which flew successfully in 1966. SCSG would use his old design, whose landing legs were mounted on a despun section.
#moon #GLXP
#moon #GLXP
SCSG announced a landing site near 0° N, 70° W for their spacecraft 'Spirit of Southern California'. This location would allow a relatively easy vertical descent, an idea which had also driven the Luna 9 and Surveyor 1 site selections. They also referred to being 'within reach of Luna 9', which lay 300 km from their original target and might have made an alternative target if its exact location was well known. But it was not, as we saw in the lunar landing sites thread.
#moon #GLXP
#moon #GLXP
Here is their site and the approximate location of Luna 9. The lander was to hop to a new location to cover the distance required by GLXP, but would probably not have been able to fly all the way to Lna 9 even if its location was known. SCSG withdrew from the competition on 24 May 2008 after the Team Summit, citing philosophical differences with the X Prize Foundation and funding difficulties. They were not alone...
#maps #moon #GLXP
#maps #moon #GLXP

... well, they were certainly not alone with the funding difficulties, but the X Prize rules, which evolved over the course of the competition, were onerous and the subject of much concern. For instance, licensing image or video rights could be a source of income for cash-strapped teams, but the X folk wanted to control almost everything and limited what could be done like that. Some teams considered dropping out before flying, to retain ownership of data.
#moon #GLXP
#moon #GLXP
Spoiler - Moon Chronicle part 8 includes the material I'm pillaging for this thread.
We have seen the GLXP teams announced in February 2008. The next set of 4 teams was announced in May 2008. I don't know much about the first 2, though they probably did more than I know (any advice welcome).
The Malaysian team Advaeros (Advanced Aerospace Industries) did not progress very far and withdrew in 2010. The team described a spacecraft called Picard but few details were released.
#moon #GLXP
JURBAN (Juxtopia Urban Robotics Brilliant Application National) was led by Dr. Jayfus Doswell of the Juxtopia Group, an educational organization from Baltimore dedicated to helping disadvantaged youth. Their spacecraft would be called JOHLT, an acronym derived from the names of African, native American and Hispanic American astronauts. It would land at the Apollo 12 landing site, though other sites would be considered. I know nothing else about them. More substance tomorrow.
#moon #GLXP
#moon #GLXP
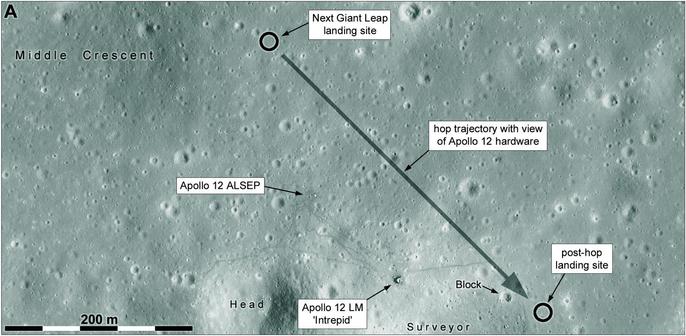
Our next May 2008 GLXP team is Next Giant Leap, which planned a lander with hopping rather than roving capability, tentatively aimed at Surveyor 3 and Apollo 12. Initially they planned to land on an anniversary of the Apollo 12 landing, 19 November. Next Giant Leap concealed its identity at first by calling itself The Mystery Team, and its members were only announced in December 2008. They had backing from some big names including Draper Lab (who now have a CLPS mission) and MIT.
#moon #GLXP
#moon #GLXP
The mission would include an upper stage impact which might provide an imaging target. A promotional video released in early 2010 showed the landing site a short distance northeast of Middle Crescent Crater, just north of the outer point of Apollo 12 EVA 1. The hopping vehicle was shown lifting off and flying near the LM descent stage to touch down again just east of Block Crater, a distance of about 750 m. It would image the LM as it passed by.
#maps #moon #GLXP
#maps #moon #GLXP
The flypast of the LM matched NASA's guidelines for protection of heritage sites which were being put together around this period. In May 2012 Next Giant Leap was absorbed into Moon Express, another team with a hopping lander.
The mention of an upper stage impact is interesting. China's current plan for landing crews on the Moon has a braking rocket under the lander. It is discarded for the final descent (like NASA's Surveyors in the 1960s) and will make an interesting sight.
#moon #GLXP
Few of the GLXP teams had real science goals. Most were only looking to meet the competition goals or thinking of the entertainment value. Team STELLAR (the last May 2008 team) described a mission which combined aspects of GLXP and the proposed International Lunar Network. It would land at 10.925° S, 16.36° E on the rim of Descartes C within a nearside magnetic anomaly, and the rover would drive to the Apollo 16 site about 60 km further north. The lander's name was Stellar Eagle.
#moon #GLXP
#moon #GLXP
This map shows the approximate rover path based on their description. Other sites were also considered by the team, including Luna 17 and Surveyor 1. The team was reorganized in 2010 under a new leader and planned to fly a cubesat to test their lunar cruise systems in 2011. By mid-2012 the team had been reconstituted again under a third leader and had a new landing site near Apollo 12. I am not aware of any further progress.

Two new GLXP teams were announced on 7 October 2008. Independence-X was a Malaysian team with a rover initially called Independence Lunar Rover-1 (ILR-1), and later Blizzard, and a lander named SQUALL (Scientific QUest Autonomous Lunar Lander). It rebranded itself IDXAerospace and eventually merged with another team called Synergy Moon, and a joint mission video in 2017 showed SQUALL landing in Mare Imbrium, southeast of Carlini D at about 32.6° N, 15.5° W later that year.
#maps #moon #GLXP
#maps #moon #GLXP

You can see we are getting a lot of sites now - after we review all the teams I will post a map of all the GLXP sites. But now - you'll have to excuse me, I just spotted a typo in Chronicle part 8 so I will fix it and repost the file. As I get older I find my proofreading becomes less reliable.
The second October 2008 GLXP team was Omega Envoy, from Florida. Their lander was OmEn-1, the rover was Sagan, a name chosen by a public vote. In 2010 they identified Apollo 12 as a target, and Apollo 11 was also possible. A payload planners guide in March 2013 described three missions. The GLXP mission would fly between April and June 2015, carrying a rover to the Apollo 12 site. I don't know what it would do except presumably view the LM and Surveyor 3.
#moon #GLXP
#moon #GLXP
Difficulty raising funds was always a problem for these teams, but another contributing factor in the GLXP's demise was that cheap launches became hard to find. SpaceX initially promoted Falcon 1 and offered a discount to any GLXP team which used it, but it was withdrawn from the market to make way for Falcon 9. Another option was Russia's Dnepr launcher, a converted ballistic missile (think ITAR). Others relied on new rockets which never materialized (like Interorbital's Neptune).
#moon #GLXP
#moon #GLXP
On 16 December 2008 2 new teams were announced. One was Euroluna (European Lunar Exploration Association). Its spacecraft was called ROMIT (I don't know what it means). It would fly late in 2009, a date soon delayed. The team tried to fly a small cubesat in Earth orbit to test systems for the lunar mission. This was supposed to fly in 2011 but launch provider Interorbital failed to fly their Neptune rocket in time (and never did).
#moon #GLXP
#moon #GLXP
Euroluna operated on a tiny budget and devised an extraordinary method of landing. Their very small cubesat spacecraft would use an ion engine to cruise slowly to the Moon, brake into orbit and descend to a low orbit. Eventually it would separate into two parts linked by a tether and would be set spinning rapidly so that the lander at the bottom of its tethered motion was moving backwards relative to its descent trajectory (like the bottom of a bicycle wheel).
#moon #GLXP
#moon #GLXP
The idea was to be moving backwards as fast as possible, reducing the relative speed between the lander and the surface to a survivable value. A test flight planned for 2014 never happened. For simplicity it lacked a steerable antenna, so when on the surface it would transmit upwards and therefore had to land near the centre of the lunar disk. Oddly this method of landing has not been adopted by either of the Artemis HLS teams.
#moon #GLXP
#moon #GLXP
The last GLXP team joining the competition in 2008 was Selene, a joint German-Chinese group based in Shanghai. They planned to build their own launch vehicle (never a good idea) and would drive a rocket-powered car on the lunar surface. The spacecraft would be called SELENA 1, and the rover LuRoCa 1 (Lunar Rocket Car 1). Mobility studies included vehicles with wheels or skis to slide along the ground, and hopping systems. Selene was also the name of the team leader's wife.
#moon #GLXP
#moon #GLXP
Celebrating the Chinese invention of rockets and fireworks, team Selene also planned a display of specially designed fireworks on the Moon. I don't know how that would work but presumably it could be done. The team withdrew in August 2011. I have no information about any potential landing sites.
2009 produced several new teams. We will look at them starting tomorrow.
#moon #GLXP
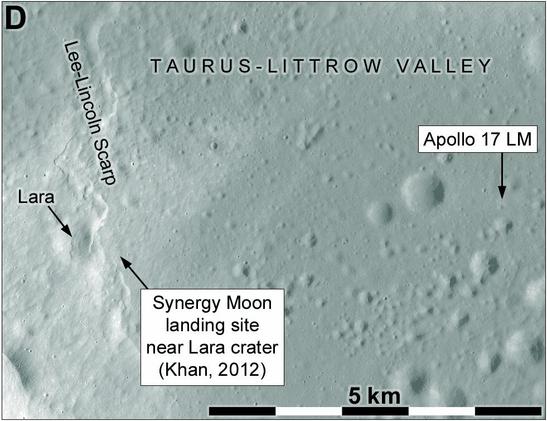
The first 2009 entrant in the GLXP was Synergy Moon, from the US and Bosnia and including InterOrbital as a partner (who never got their rocket to fly). Synergy Moon's lander would deploy a rover, first called Spherical Robotic Rover and later Tesla Robotic Rover, and a novel mobile spherical capsule called Tesla Surveyor containing cameras and a mobility system. The rover would deploy an art capsule on the Moon. A Croatian group within Synergy Moon planned a different rover...
#moon #GLXP
#moon #GLXP
... called Histrohod on a mission launching late in 2012 and landing near the Apollo 17 site. Khan (2012) described a landing near Lara crater about 5 km west of the Apollo 17 LM. That would be close to the Apollo 17 EVA 2 station 3 at Ballet crater. The maximum rover range of 10 km would allow a visit to the ALSEP or LM areas, and the Lee-Lincoln scarp might also be investigated. This plan evolved in later years.
#moon #GLXP #apollo17
#moon #GLXP #apollo17
In August 2012 Synergy Moon described a plan to drop penetrators during descent to the surface. These solar powered ‘MoonStakes’ would carry a communications system and possibly seismometers to form or contribute to a seismic network, and would also constitute ‘mineral claims’ allowing the sponsor to claim ownership of any resources over a region up to 500 m from the penetrator, testing lunar law on the question of resource ownership. But there was to be no landing by this team.
#moon #GLXP
#moon #GLXP
White Label Space began as a 'brandless' (white label) team to be renamed later for a sponsor, before it joined GLXP in 2009. Its international team had headquarters in the Netherlands. It suggested landing on a sunlit south polar peak but the precision needed for such a small target made this impractical. An unspecified safe mare site took its place. A December 2009 description put it between 50° W and 50° E and between 10° N and 10° S. Four mare regions were considered...
#moon #GLXP
#moon #GLXP
... Oceanus Procellarum near Surveyor 1, northern Mare Nubium east of Fra Mauro, Mare Vaporum and southern Mare Tranquillitatis. A preferred landing site outside these areas was chosen near the crater Delambre in the highlands south of Apollo 11, in a smooth highland plains area at 3° S, 19° E. The rim of Delambre to the west and hills to the east would appear on the horizon. This map shows White Label Space areas of interest and some from another team we will see later.
#maps #moon #GLXP
#maps #moon #GLXP

There's more to say about this team, but it's bedtime. See you tomorrow!
Here is a map of the Delambre site for White Label Space (WLS) in the highlands south of Apollo 11.
In September 2010 a Japanese group in WLS started work on the project. In 2013 the European side of the team folded and the team continued in Japan under co-founder Takeshi Hakamada. The company changed its name to ispace Inc. and the GLXP team took the name of its second rover prototype, Hakuto (White Rabbit), referring to a legend of a rabbit in the Moon.
#moon #GLXP

Hakuto's rover, first named Moonraker, could carry a small rover (Tetris) for extra data and views of Moonraker. The 2 rovers could be tethered so Tetris could descend into pit at the Astrobotic site (Hakuto had no lander of its own). A 2015 paper described the landing near the Lacus Mortis pit and that site remained an ispace target even after the association with Astrobotic ended. ispace did build a lander later but moved away from Lacus Mortis.
#moon #GLXP
#moon #GLXP
The ispace rover might also fly with Team Indus (we will see them later) to a site in Mare Imbrium. Acierno (2017) described a site in Mare Imbrium at 35.25° N, 29.23° W and illustrated two possible paths for the rover (now called Sorato), each roughly 500 m long. This map shows them in the actual location. Another description suggested that the rover would approach the lander several times during its circuit, following a path resembling petals of a flower.
#moon #GLXP
#moon #GLXP

ispace continued after the GLXP and has already flown 2 lunar missions, both of which crashed. But they have more coming including a NASA CLPS mission with Draper Lab.
Now we move to a team which did not survive. They had a great idea but couldn't raise the money. This is Selenokhod, a Russian team which called itself Googlokhod before it registered. It would land near Apollo 12 or possibly Lunokhod 2. Their rover was also called Selenokhod, to distinguish it from Lunokhod.
#moon #GLXP
Selenokhod worked with some Soviet-era space veterans, notably Lunokhod driver Vyacheslav Dovgan, and planned a rover which walked on ski-like feet like the tiny Prop-M rovers carried to Mars on the Mars 2, 3 and 6 landers. An updated rover design by Smirnov Design was illustrated in video simulations. You have to see this. I would have given them a prize just for this video:

Selenokhod-2011.03.30
Selenokhod had no lander, and in a 2012 concept the walking rover would be carried to the Moon on the Luna-Glob lander, which was expected to fly in about 2015 but 'might be delayed until after the GLXP deadline'. It was - it flew in 2023. The use of a government asset like this would have contravened GLXP rules. The team withdrew in 2013 to 'use its technology in terrestrial applications'. I don't know if they did.
#moon #GLXP
#moon #GLXP
Our next 2009 team is Part Time Scientists, a German team with a rover called Asimov 1. In 2010 they said they would land between the Apollo 12 and Apollo 14 sites (or that the choice was between those sites), but in 2012 the Apollo 17 site was chosen. The lander was named Jules Verne, later changed to Autonomous Landing and Navigation Module (ALINA). The rover name changed in 2015 when Audi was announced as a sponsor and the rover name became Audi Lunar Quattro.
#moon #GLXP
#moon #GLXP
As the team became less ‘part-time’ they contracted their name to PTScientists. They booked a launch with Spaceflight, Inc., a Seattle broker of secondary launch services using spare space and mass on existing rockets to meet the GLXP deadline for arranging a launch before the end of 2016. Spaceflight did not have a specific launch opportunity at that time, and the GLXP did not accept the arrangement as a firm launch booking so the team was not able to continue.
#moon #GLXP
#moon #GLXP
PTScientists continued work on a mission outside the GLXP. In 2019 they were part of a consortium including Arianespace which won a contract from ESA to study polar landing missions. In July 2019 funding shortfalls forced PTScientists into bankruptcy, but in September they were acquired by another company, changed their name to Planetary Transportation Systems (PTS GmbH) and continued their work on that contract. More details here:
The last of our 2009 GLXP teams was C-Base Open Moon from Germany. 'Open' in the name signifies open source, a philosophy several teams adopted. Their rover would have been called C-rove. They invited the public to choose a landing site from among four candidates as seen here. They are shown on the White Label Space map a few posts ago. The competition was not promoted beyond their website and the team withdrew in July 2011 without choosing a landing site.
#moon #GLXP
#moon #GLXP

We are working through the Catalogue of GLXP Teams, and now we come to teams joining in 2010. The first of them was the Barcelona Moon Team. It registered in April, and in August 2012 they announced they had booked a launch on a Chinese Long March rocket in June or July 2014, later delayed to 2015 and then to June 2016. In 2013 they described further lunar missions every 2 years after the first landing. They would fly Earth-orbiting missions in the years between lunar missions.
#moon #GLXP
#moon #GLXP
The Barcelona Moon Team lander would carry SELENA (Sustainable Experiment on Lunar Exploitation using a Nanotechnology Approach) to detect lunar volatiles and/or demonstrate extracting oxygen from the regolith. The landing site would have been near the equator (so, to be honest, not many volatiles) according to a Grokipedia article (https://grokipedia.com/page/barcelona_moon_team). Barcelona Moon Team withdrew from the competition in 2015. I don't know much more about them.
#moon #GLXP
#moon #GLXP

Our next GLXP team is Rocket City Space Pioneers (RCSP), which joined in September 2010. The 'Rocket City' was Huntsville, Alabama. The team included the University of Alabama in Huntsville and the Von Braun Center for Science and Innovation. At the GLXP Team Summit held in the Isle of Man in October 2010, RCSP identified an illuminated area at the south pole as their landing site. The RCSP lander would release a small tethered rover with a range of at least 1000 m.
#moon #GLXP
#moon #GLXP
@PhilStooke BMT was initiated by a well-connected architect-led creative group (Galactic Suite) who had done a number of space related boundary-pushing studies.They quickly recruited a local space and aerospace technology centre (CTAE), who could deal with requirements and build out the industry consortium. It included leading space companies in Spain, including Sener, GMV, EADS-Casa, the academic groups in UPC on payload. Through CTAE, a whole community of subsystem providers were identified.
@PhilStooke I was head of R&D at CTAE between 2007 and 2011 and was deeply involved in the full weirdness of this project working with architects alongside engineers. The team summit in 2008 on the Isle of Man clearly showed the focus of Astrobotic, but most of the rest of us were at a similar stage: basic feasibility now meeting funding roadblocks.
Grokipedia ? AI-generated online encyclopedia
https://en.wikipedia.org/wiki/Grokipedia
«A Nov 2025 review of Grokipedia's content by PolitiFact found that article content that differs from Wikipedia includes unsourced content and misleading or opinionated claims, and that Grokipedia occasionally includes incorrect citations for its sources. It described pages as crediting sources that did not exist, and that some pages contained no citations other than saying it was adapted from Wikipedia.»
