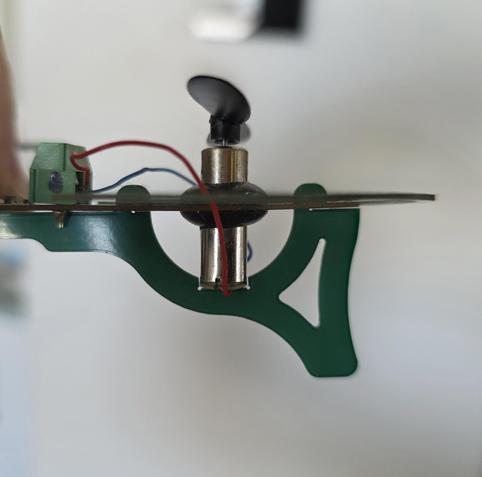
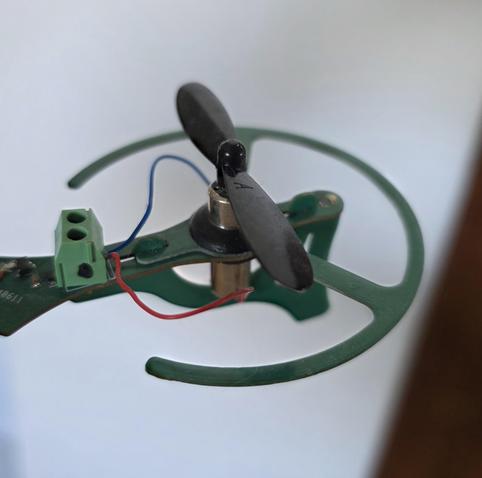
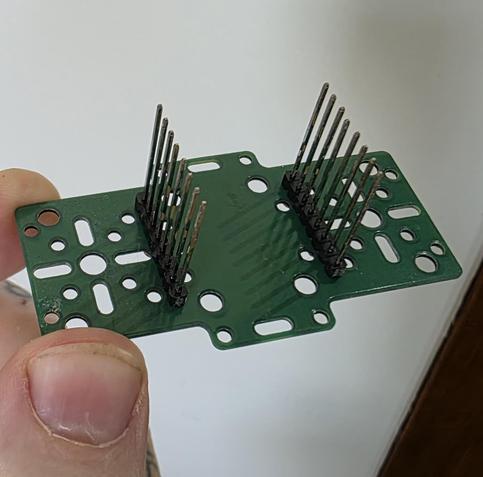
One of the last projects I did at SparkFun before I was laid off never made it to the storefront and I completely forgot about it until I found a prototype just now. The goal was to make some design tweaks to the ESP-drone project so that the end user didn't have to do any soldering to assemble it (provided the reflow soldered PCB)