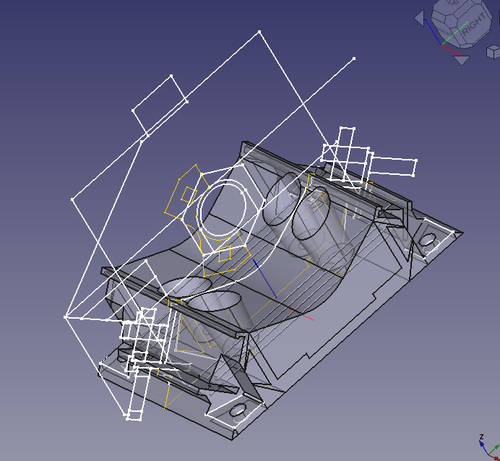
The past two days I have a brain-worm / project idea of building a 3D printer via a wall-mounted 6DOF parallel robot driven by 8 linear drives (i.e. the typical z-axis spindles) mounted in parallel on the wall.
+ That would make the robot over-determined and should avoid any singularities but add extra stiffness
+ Should be able to retract very near the wall when not in use
+ Uses mostly the same building blocks 8 times instead of different mounting methods per axis
+ Able to print in arbitrary 3D paths
- Slicers will not support this out-of-the-box
- I heard there is a thing called "inverse kinematics" and allegedly I need to understand that, OTOH I feel it should be simple to intersect the strut-length induced spheres with the linear drives and that should answer all practical questions.
- Doing this as my first ever CAD project seems a bit overambitious, speaking from the outside perspective.
- I have never built a 3D printer before
- I have never built a robot before
- I have never driven a stepper motor before
Any input/suggestions welcome.