A few things going on with this one that might not be obvious.
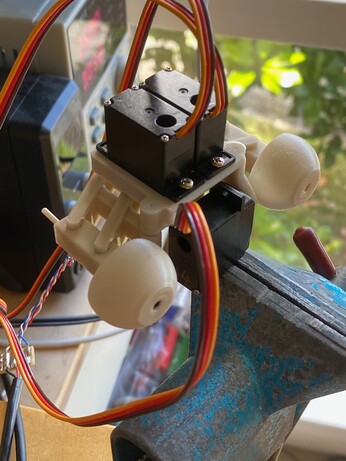
I'm controlling it with a headset that tracks my head and eye movement. It also has cameras in the eyeballs, streaming a stereo feed back to the headset. Where I look, it looks.
Another stewart platform for the mount - they're great for getting fluid and responsive motion out of cheap servos.