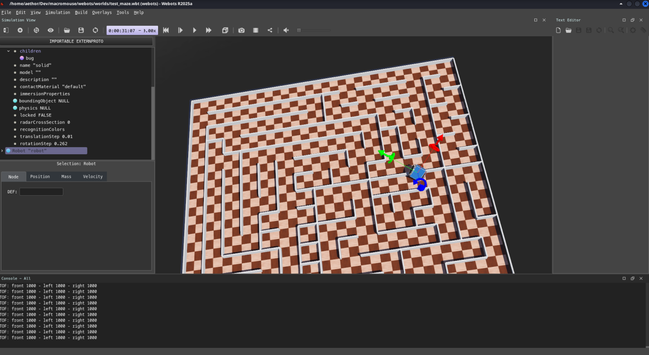
A lot of work on the #micromouse during this holiday. The tof sensors are working in #webots and the navigation code seems OK too. But still plenty of small stuff to debug and code to clean up.

How to solve any maze


Готовимся к Micromouse: как роботу найти короткий путь к цели
Привет, Хабр! Я Денис Логашов, инженер-исследователь отдела автоматической обработки результатов моделирования и визуализации
https://habr.com/ru/companies/yadro/articles/869888/
#micromouse #робототехника #соревнования_роботов #алгоритмы #алгоритм_заливки
Готовимся к Micromouse: как роботу построить карту лабиринта
Привет, Хабр! Меня зовут Денис Логашов, я инженер-исследователь отдела автоматической обработки результатов моделирования и визуализации YADRO. В этом году мне предложили поучаствовать в соревновании по робототехнике в дисциплине Micromouse, где роботизированной мыши нужно как можно быстрее найти путь в центр лабиринта и понять, что цель достигнута. Такие соревнования проводятся в разных странах уже почти 50 лет, и в этом году Micromouse вошел в программу фестиваля РобоФинист 2024 в Санкт-Петербурге, где мы заняли второе место. Я работал в паре с другим инженером и отвечал за программную часть робота. По моим наблюдениям, меньше половины участников соревнования поняли задачу соревнования, а остальные создали типичный алгоритм прохождения лабиринта, где предусмотрен только один путь от старта до финиша. Поэтому в серии постов я расскажу, какие подходы использовал сам, чтобы решить комплексную задачу Micromouse — исследование лабиринта, построение карты и поиск кратчайшего пути.
https://habr.com/ru/companies/yadro/articles/859756/
#программирование #лабиринт #робототехника #micromouse #робофинист

I didn't realise Micro Mouse maze solving had developed so far! These tiny homebuilt robots scan and solve a maze as.dastnas they can without any outside information.
https://youtu.be/ZMQbHMgK2rw?si=ezSVHPc-gyCseylX
#robotics #micromouse
Our micromouse is able to drive around without hitting walls now, just in time for the competition.
Just need to solder on the buttons, the buzzer, and the other 4 proximity sensors and the #micromouse electronics are done.
Managed to test the IR proximity sensing circuitry, the motor drivers, the shift register, the microcontroller and the LED's. Only mistakes found so far are some flipped transistor footprints. Also needed to make some adjustments to the IR input filter, but I was prepared for that.
The next 3 weeks are exams though, so the rest will have to wait.