LFT Days' best paper competition deadline is extended to 31.1.2025! Please submit your 2024 paper in medical physics/engineering to be eligible for the prices at LFT Days 13.-14.2.2025 in Tampere: https://www.lfty.fi/lft_paiva/index.php

@SimoSarkka
- 183 Followers
- 25 Following
- 15 Posts
Associate Professor with Aalto University working on Bayesian filtering and smoothing, stochastic control, and machine learning (AI, I guess).
We are hiring! Research positions (PhD and postdocs) in physics-informed machine learning, magnetic resonance fingerprinting, and materials science, deadline 15.10. Apply here: https://www.aalto.fi/en/open-positions/research-positions-phd-and-postdocs-in-physics-informed-machine-learning-magnetic-resonance
The 2nd ed. of "Bayesian Filtering and Smoothing" is hot off the press – or the physical copies are still on the way, but you can start reading the *free online copy*: http://users.aalto.fi/~ssarkka/pub/bfs_book_2023_online.pdf also linked on my web page: https://users.aalto.fi/~ssarkka/
Särkkä & García-Fernández (2023). Temporal Parallelisation of Dynamic Programming and Linear Quadratic Control. Volume 68, Issue 2, 851-866:
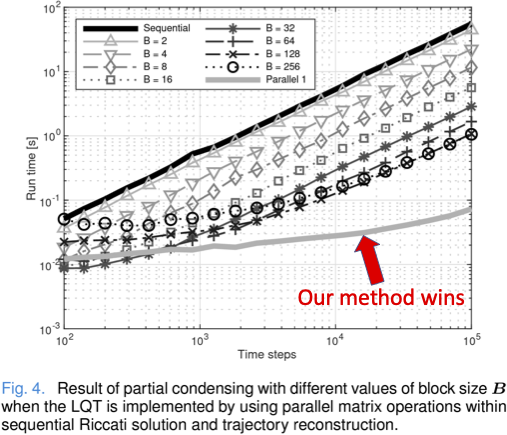
We show that it is possible to parallelise Bellman's dynamic programming using parallel scans on GPU. This leads to interesting parallel LQT, minimum-path, and other algorithms as special cases.
The Python/TensorFlow codes for reproducing the experiments can be found here: https://github.com/EEA-sensors/parallel-control-codes

Did you know that you can do optimal control in parallel? This month, in IEEE Transactions on Automatic control, we have our paper
Särkkä & García-Fernández (2023). Temporal Parallelisation of Dynamic Programming and Linear Quadratic Control.
IEEE: https://ieeexplore.ieee.org/document/9697418
arXiv: https://arxiv.org/abs/2104.03186

Temporal Parallelization of Dynamic Programming and Linear Quadratic Control
This article proposes a general formulation for temporal parallelization of dynamic programming for optimal control problems. We derive the elements and associative operators to be able to use parallel scans to solve these problems with logarithmic time complexity rather than linear time complexity. We apply this methodology to problems with finite state and control spaces, linear quadratic tracking control problems, and to a class of nonlinear control problems. The computational benefits of the parallel methods are demonstrated via numerical simulations run on a graphics processing unit.
Koululaisen ChatGPT:llä tekemä kirjoitelma meni täydestä – tekoälyprofessorin mukaan hittibotti on mestari lähinnä "bullshitissä" ja "mansplainauksessa" #ChatGPT #Tekoäly https://www.mtvuutiset.fi/artikkeli/koululaisen-chatgpt-lla-tekema-kirjoitelma-meni-taydesta-tekoalyprofessorin-mukaan-hittibotti-on-mestari-lahinna-bullshitissa-ja-mansplainauksessa/8597214#gs.lzdlyu

Tomorrow, December 8:
AI for Sustainability, when FCAI meets the Helsinki Institute of Sustainability Science
https://fcai.fi/calendar/2022/12/8/ai-for-sustainability-fcai-x-helsus

Open position – tenure-track Assistant Professor in Automatic Control at Aalto University (DL 8.1.2023): https://www.aalto.fi/en/open-positions/assistant-professor-automatic-control
Welcome to "AI in robotics and smart materials" seminar on Thu 1.12. in 13-16 at Dipoli/Aalto-University & online. Joint seminar organized by IEEE and FCAI: https://site.ieee.org/finland-csrasmc/2022/11/10/ai-in-robotics-and-smart-materials-future-of-robotics-in-finland-seminar-2022/