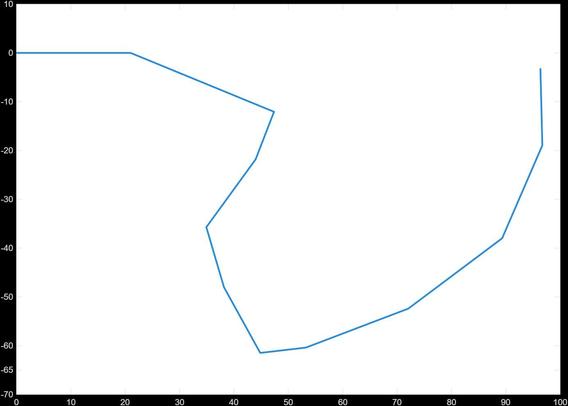
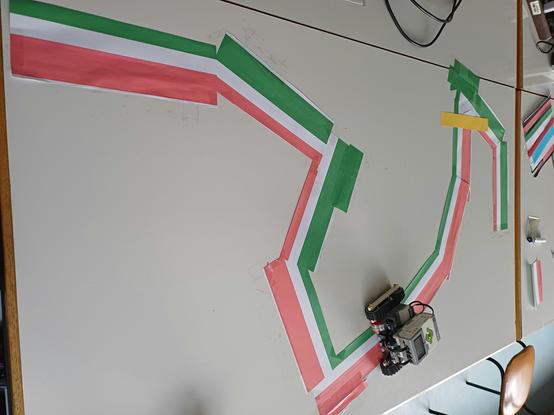
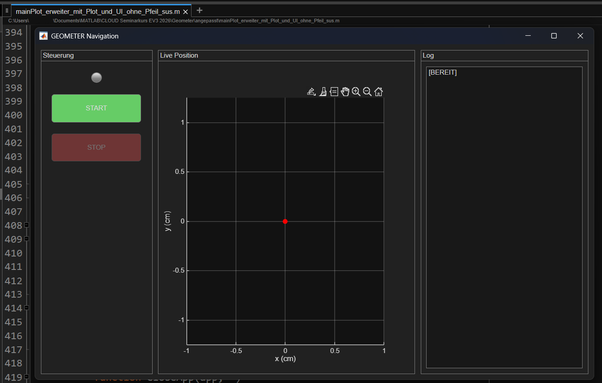
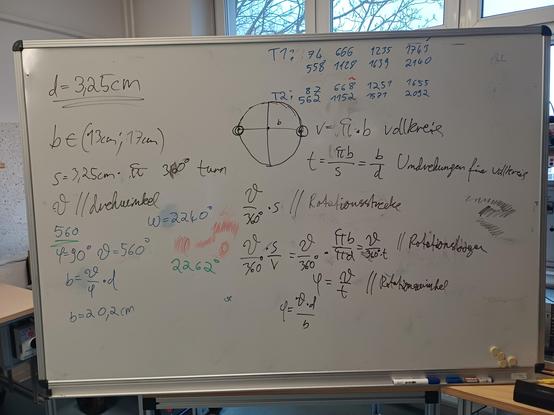
Der Roboter ist darauf ausgelegt, autonom einer definierten dreifarbigen Linie zu folgen. Parallel zur Navigation erfasst das System kontinuierlich die eigene Position (Odometrie), um den zurückgelegten Pfad digital zu plotten und geometrische Berechnungen, wie etwa eine Flächeninhaltsberechnung, durchzuführen.