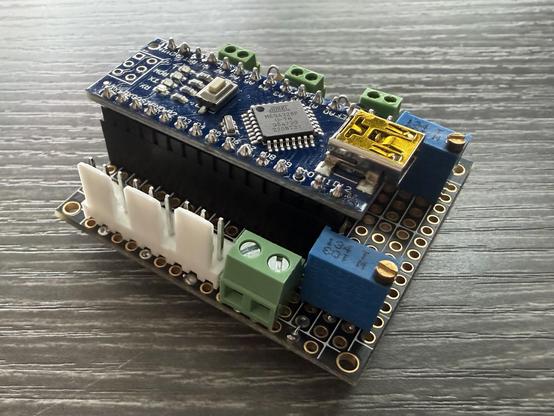
Today’s lunchtime project: nearly completed a prototype of an Arduino Nano based semaphore signal controller. The inputs (green terminals on the far side) are compatible with SigNaTrak’s SIGM20, so you just wire up red (or green) of a two aspect signal. The outputs are straight servo connections. The board requires 5V to work.
The Arduino reads a digital input and uses the value to decide if the associated servo output should be in one of two positions. Those positions are set by the adjustable potentiometers. If the servo isn’t in the right position, it moves to that position, but slowly.
This allows you to connect a small servo to a semaphore signal and drive it from the SIGM20 as if it were a two aspect red/green signal. The board actually supports three servos in total.
I’ll need two such boards to support all the semaphore signals I’m planning to install, they’ll cost me maybe £15 each in this prototype form.