Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
Authors: Francesca Rossi, Émiland Garrabé, Giovanni Russo
pre-print -> https://arxiv.org/abs/2412.06636
code -> https://github.com/GIOVRUSSO/Control-Group-Code/tree/master/Neo-FREE
#robotics #control #optimal_control #movement_primitives

Neo-FREE: Policy Composition Through Thousand Brains And Free Energy Optimization
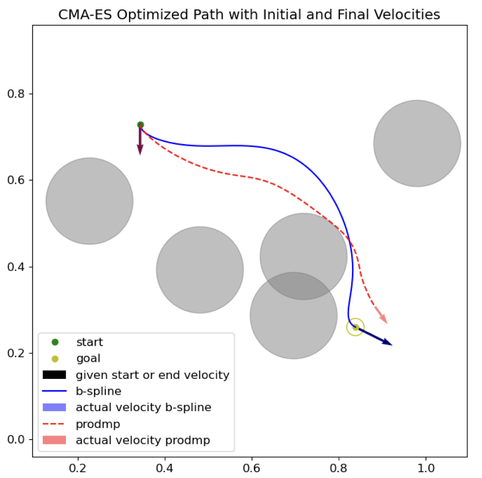
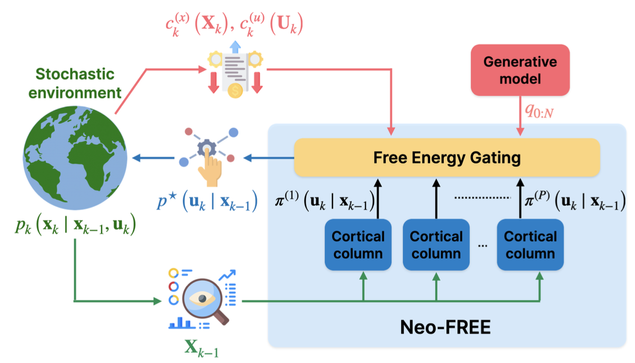
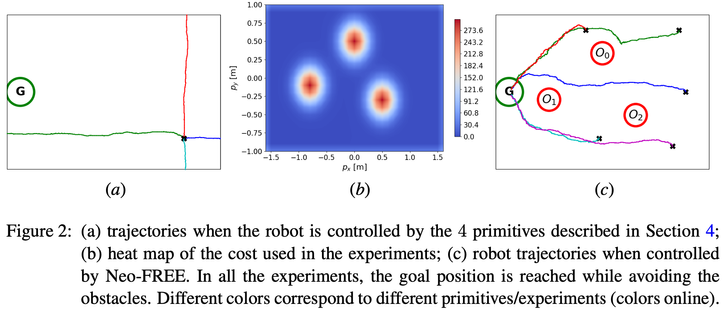
We consider the problem of optimally composing a set of primitives to tackle control tasks. To address this problem, we introduce Neo-FREE: a control architecture inspired by the Thousand Brains Theory and Free Energy Principle from cognitive sciences. In accordance with the neocortical (Neo) processes postulated by the Thousand Brains Theory, Neo-FREE consists of functional units returning control primitives. These are linearly combined by a gating mechanism that minimizes the variational free energy (FREE). The problem of finding the optimal primitives' weights is then recast as a finite-horizon optimal control problem, which is convex even when the cost is not and the environment is nonlinear, stochastic, non-stationary. The results yield an algorithm for primitives composition and the effectiveness of Neo-FREE is illustrated via in-silico and hardware experiments on an application involving robot navigation in an environment with obstacles.
BMP: Bridging the Gap between B-Spline and Movement Primitives
Authors: Weiran Liao, Ge Li, Hongyi Zhou, Rudolf Lioutikov, Gerhard Neumann, @KIT_Karlsruhe
pre-print -> https://arxiv.org/abs/2411.10336
#robotics #movement_primitives #mp #bsplines #planning #robot_learning
BMP: Bridging the Gap between B-Spline and Movement Primitives
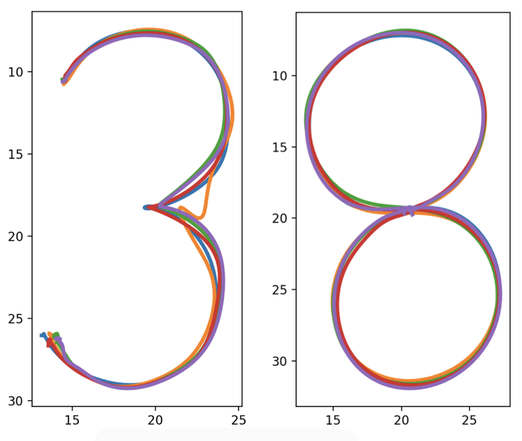
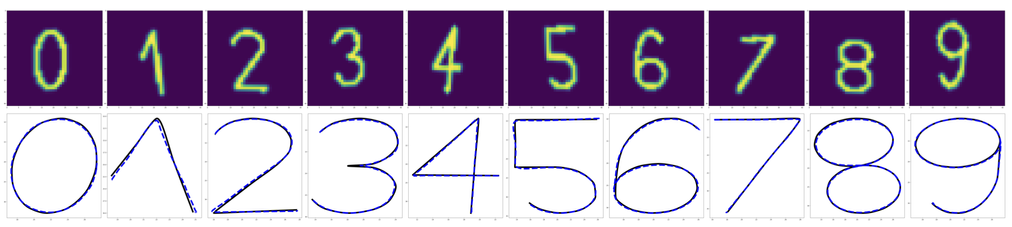
This work introduces B-spline Movement Primitives (BMPs), a new Movement Primitive (MP) variant that leverages B-splines for motion representation. B-splines are a well-known concept in motion planning due to their ability to generate complex, smooth trajectories with only a few control points while satisfying boundary conditions, i.e., passing through a specified desired position with desired velocity. However, current usages of B-splines tend to ignore the higher-order statistics in trajectory distributions, which limits their usage in imitation learning (IL) and reinforcement learning (RL), where modeling trajectory distribution is essential. In contrast, MPs are commonly used in IL and RL for their capacity to capture trajectory likelihoods and correlations. However, MPs are constrained by their abilities to satisfy boundary conditions and usually need extra terms in learning objectives to satisfy velocity constraints. By reformulating B-splines as MPs, represented through basis functions and weight parameters, BMPs combine the strengths of both approaches, allowing B-splines to capture higher-order statistics while retaining their ability to satisfy boundary conditions. Empirical results in IL and RL demonstrate that BMPs broaden the applicability of B-splines in robot learning and offer greater expressiveness compared to existing MP variants.