Choreographing multi-agent interactions 🤖💃
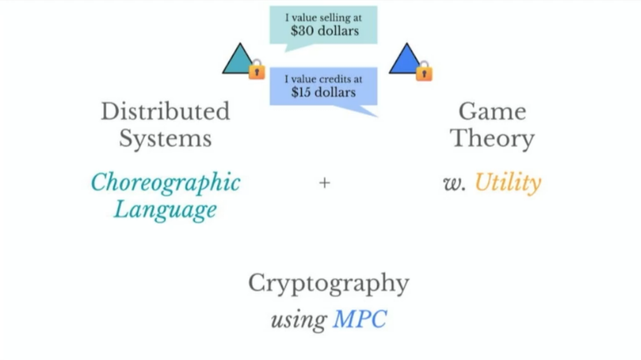
I’ve been thinking about multi-agent systems less as prompt chains and more as distributed systems. Once the workflow stops being toy-sized, the hard part is no longer getting a response from a model. It is making the whole topology behave predictably.
I wrote a draft about how I’m using choreographic programming and strong types to make agent interactions more predictable. It traces a path from UniChorn (my port of HasChor) to a Ralph-loop experiment leveraging the new research-backed CP libraries like choreography-ts, a small Pi-based library for schema-constrained turns, and a NATS transport for running the choreography across locations.
This is just the initial post, and I will write more as I am working on more interesting stuff on top of this foundation.
#ai #choreographicprogramming #distsys
https://notes.kaushikc.org/3mjvw6k37ws2f